Hello,
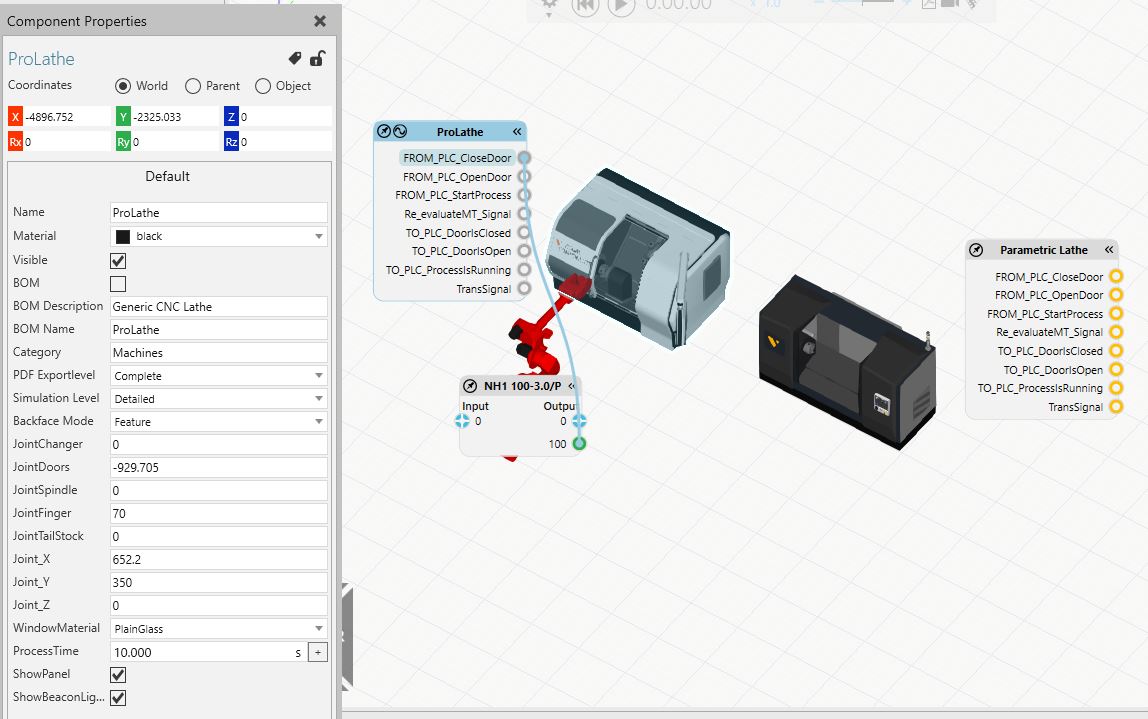
I noticed that is possible to control some machine from e-catalog by signals. For example machine “ProLathe” .But i do not know how to switch machine into “default mode” - where signals are available as i discovered.
In python script is written:
def OnRun():
if transportNode.TransportLinks:
suspendRun()
elif MT_ResourceInterface.IsConnected:
machine_tending_mode()
else:
default_mode()
but if is machine connected by signal and not connected by interfaces, first condition is always valid - suspendRun().
If I edit script and use default_mode() there, controlling by signal from robot works.
But how can do it user of Essentiall version?
Thank you for somme recomendation.