Hello there,
there are some wired things going on during my simulation.
I have a feeder, a robot, two belts and on each belt one entry and one exit Signal Sensor.
First a little Question:
Is it possible to place a raycast sensor at the feeder, to get the information when a box is created, or can I somehow control the advanced feeder by a boolean signal, when the conveyor behind it is empty?
Issue:
The box gets transported to the end, belt 1 stops, robot picks it up, places it at belt 2 and box gets transported of the belt 2.
In the second part, another box is ready to get picked up by the robot but the robot is locked by the Python Script (my own written one) because of the belt 1 entry Sensor Signal still being True. Without a box it should be False, why is this still True?
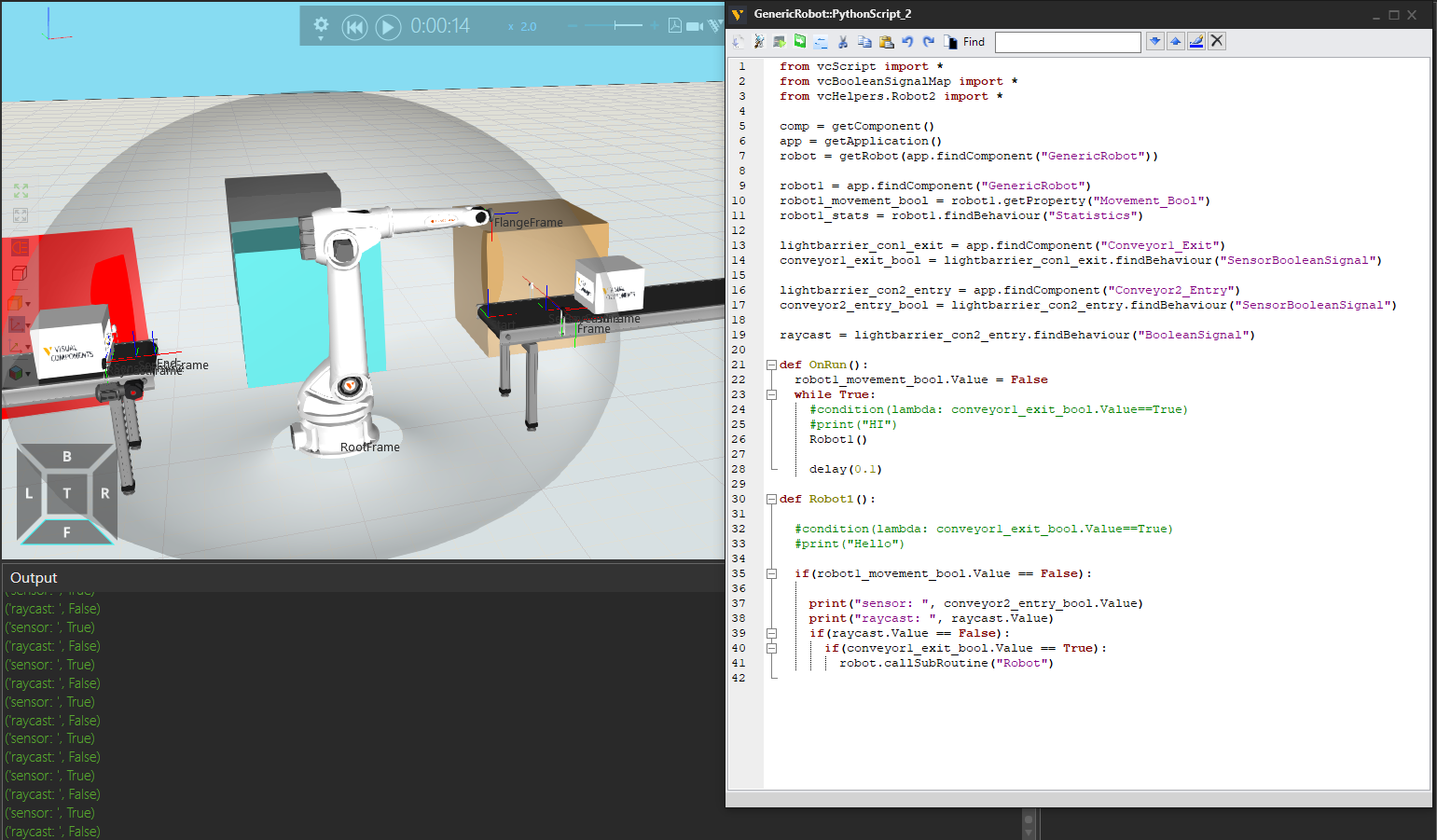
So as a check, I placed a raycast sensor and checked it in the output (Sensor = Sensor Signal and Raycast = own Raycast Sensor)
But now the Raycast Sensor will not turn True at any point.
I really appreciate if someone could explain my missunderstanding or the wrong implementation.
Maybe there is a processing issue in Simulation?
Thank you
DrBro