This Topic is a follow-up from another topic sees:
The problem I am having now is after the program has runned, the value is written in HOME1 of the robot property. But not in the ‘home1’ position in the ‘controller Map’ tab. This is fixed when I restart the program. This means when I simulate I the old ‘HOME1’ position is taken, while I want it to take the new one.
The thing I was wondering is that I want to make some kind of a loop without restarting KUKA.sim (because it takes too long to restart.) Is there some kind of reload world command so that I have not to restart KUKA.sim to get the ‘new’ home position.
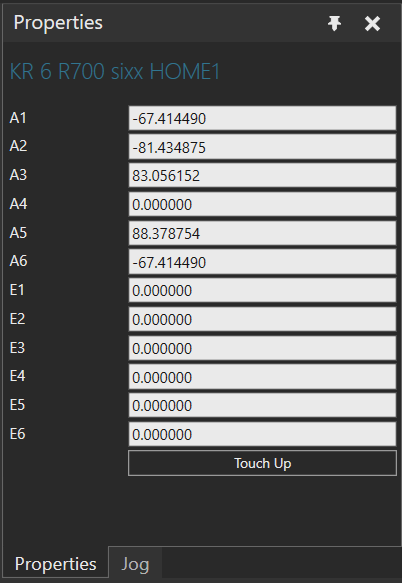
Model tab after I ran the command and before restarting KUKA.sim:

Controller map tab after I ran the command and before restarting KUKA.sim:
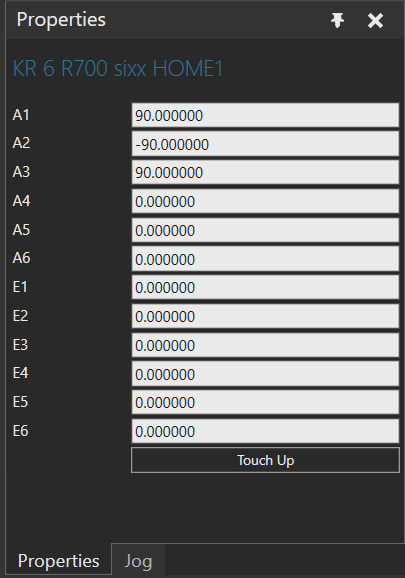
Model tab after I ran the command and after restarting KUKA.sim:
Controller map tab after I ran the command and after restarting KUKA.sim:
The code I ran:
from vcScript import *
comp = getComponent()
prop = comp.getProperty('HOME1')
prop.Value = "90;-90;90;0;0;0;0;0;0;0;0;0"
print(prop.Value)
I hope somebody can help me.
Kind regards,
Borito