Hello everyone,
I am sitting on a problem for quite some time now. Let A be a component, which has an initial position a_pick in the world coordinate system. To pick A, a gripping point and orientation gripper_pick are known in the world coordinate system as well.
Now I have a place position a_place. How do I get the orientation of the gripper for a_place?
I have tried different things already:
-
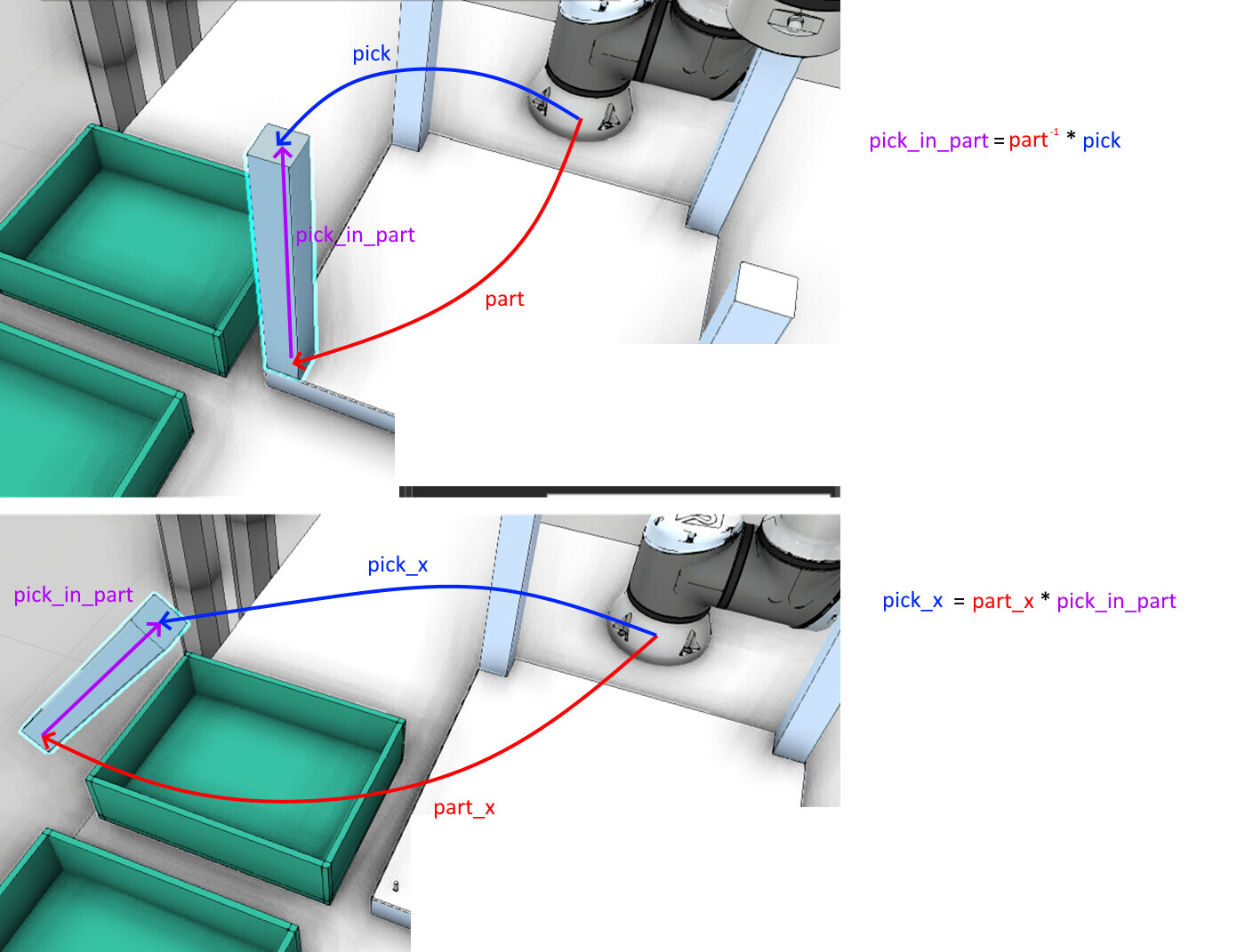
Get WPR of a_pick and a_place, calculate the difference, and add the difference to the WPR angles of gripper_pick to get gripper_place, which seemed to be reasonable, as all positions are defined in the world coordinate system. However, it didn’t work as I hoped. (See attached picture).
-
I also tried to rotate the position matrix of gripper_pick around the difference between a_pick and a_place. This however did not work either.

I use .Net API for my project to read in relevant data about positions and process sequences from a JSON File. I would be happy if someone could help me with this problem or could tell me, which function I have to use to transform the gripper orientation correctly.
Kind regards,
Josh