Hi,
I’ve got a robotarm with a gripper. On that gripper is a range sensor to measure the distance to the object on a conveyor. The raycast sensor needs a DetectionContainer from the conveyor but I don’t know how to do this.
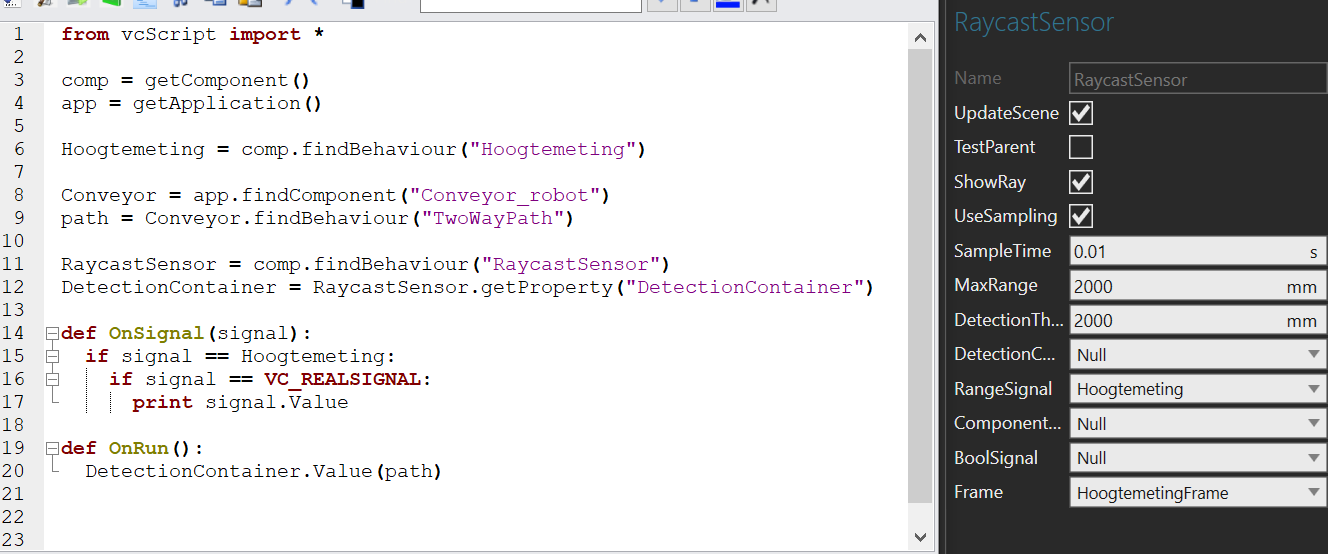
How do I say that the DetectionContainer is the TwoWayPath of the conveyor?