Hi,
I am working on a simulation where I need to control a Mobile Industrial Robotics MiR1000 EU Pallet Lift AGV using a Python Script, which interfaces with TIA Portal (via Connectivity).
The Setup:
-
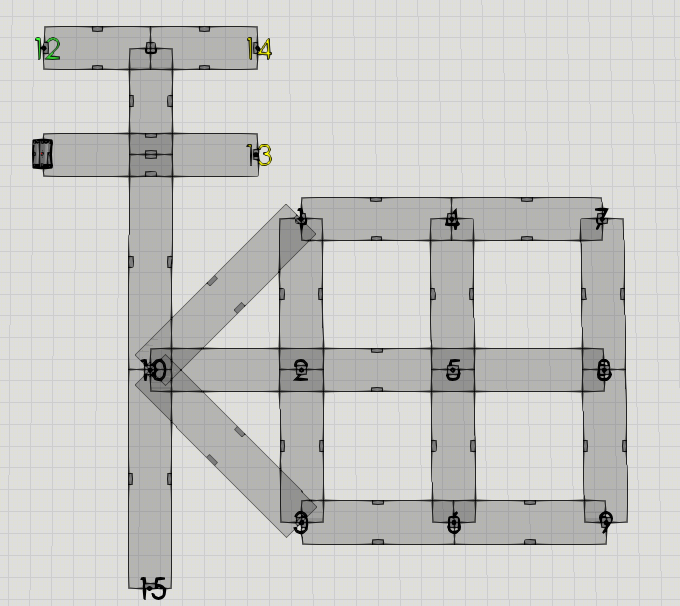
I have 15 destination points in the 3D world named Node_1, Node_2, …, Node_15.
-
The network is correctly built using the Path Builder; the paths are visible and connected.
-
In the Python script, I am reading 4 bits from the PLC that represent the target Node number (Integer).
The Goal: I want the AGV to move to the specific Node corresponding to the number received from the PLC.
The Problem: Despite being able to read the inputs and identify the target node in the script, I cannot get the AGV to actually start moving. I have tried several approaches, but the AGV remains in the ‘Idle’ state.
My Question:
-
Which specific properties or methods are mandatory to trigger a “Mission” or a move command via Python for this MiR1000 model?