Hi,
I think you did the crossing rule correctly, but there’s some odd things in the simulation, such as the robot tool model. I deleted the robot program and used PM directly. You can either modify the tool so it grabs it correctly, or use record / execute routine of the PM.
Your original .vcmx drops the pallet properly on the conveyor, but the issue here is the component origin.
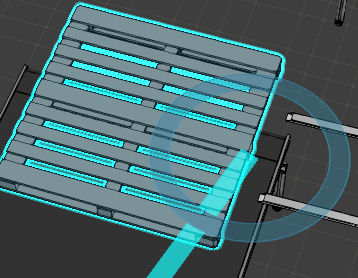
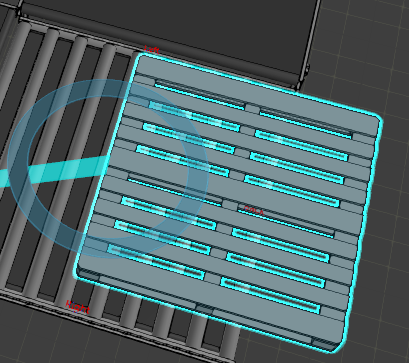
Notice how the PnP circle shows where the origin is
The origin being on the side is the reason why your pallet is not being transported from the middle of the crossing conveyor.
Br,
Lefa
robot1_1.5.vcmx (10.1 MB)