Hi,
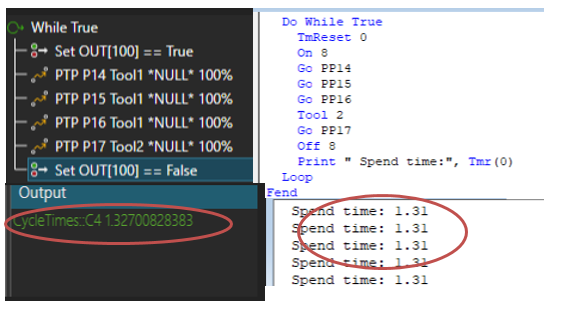
I Install this addon and tried to export the robot program to epson robot software.but I found that the movement time of the robot in visualcomponent is different from that in Epson software.
and the more complex the program,the more different in simulation time.
Does anyone know how to deal with this problem?
Thanks RobotPostProcessor_2021_09_21.zip (80.7 KB)
If the Robot in VC drives to a point exactly it needs zero time to continue with the next tasks… → Other robot controllers has some thinking time there and this failure sums up!
If you know how long the real controller needs you can implement it by a delay in VC, then the cycle time (in my case) looks really good!
This is normal, because every brand of robot controller has its own motion plan algorithm, VC’s is different from them.
If you want to get precise time for each point as real robot, need to connect VC and robot’s virtual robot controller to validate the time in real-time, but not sure if VC already support Epson.
Like what @captain_feature said, it’s much more easier to handle whole cycle time.
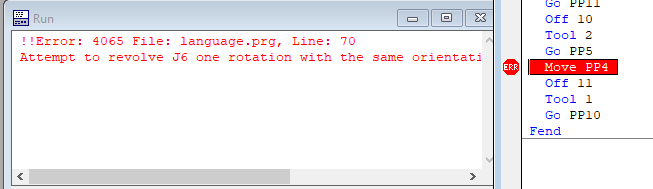
@idkfa@captain_feature Thanks for your answer,and sometime it has something wrong ,
such as the move instruction (it’s OK to use Go instruction ),I’m not sure if edited it incorrectly in VC or if it actually needs to modify in Epson software programming.