Hy,
why, when I start simulation my RobotBaseNode always get resetet to World? -_-
Thx & Regards
Feature
Hy,
why, when I start simulation my RobotBaseNode always get resetet to World? -_-
Thx & Regards
Feature
Hi, is your roboter connected to a Transport Controller?
In this case the Base 1 is used for the HelperLinearMove and HelperJointMove sequences, so it will be automatically changed when the simulation starts.
Hy,
hmmmm ok thats true. → So I defined a new Base “RootBase” which should be the new standard with my defined node, where the node is remebered! ![]()
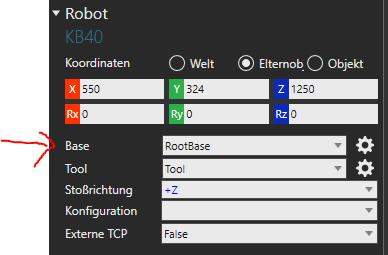
So I ran into the problem when I define in Program-Tab in Jog-panel my new Default-Base it’s getting changed to the one the Node is switched when I run simulation… -_-
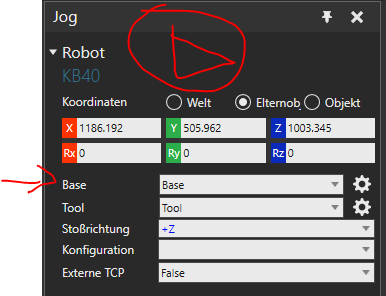
When reset simulation it jums back to my RootBase…
Thx & Regards
Feature