Hi,
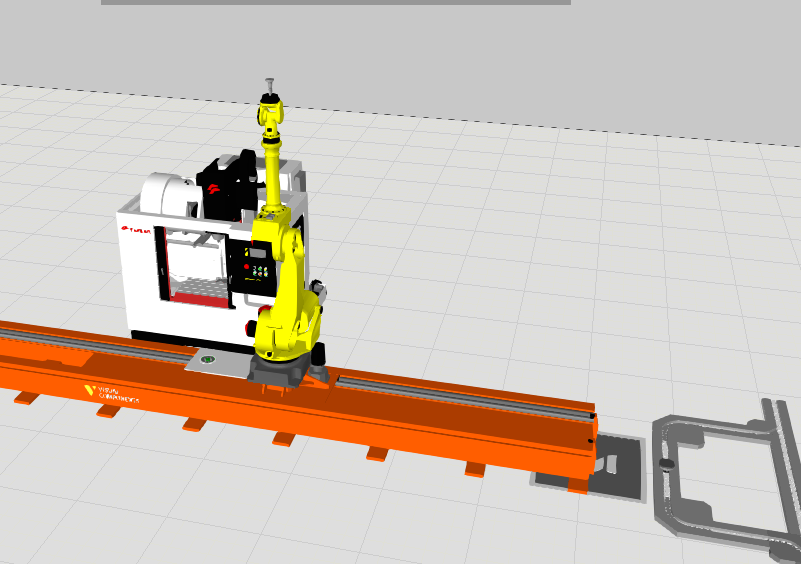
I need some help with my project. I want my robot to pick a part from a conveyor, place it onto a buffer that is attached to the robot’s platform, and then drive together with that part to the machine.
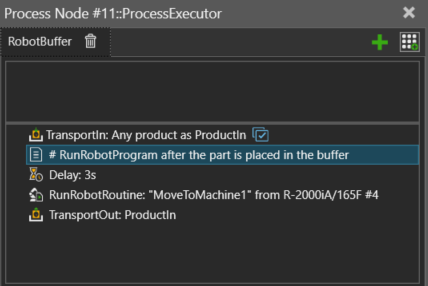
The problem is that after the robot places the part on the buffer, it immediately picks it up again and then moves to the machine holding the part in the gripper instead of leaving it on the buffer.
How can I fix this behavior so that the part stays on the buffer while the robot moves to the machine?
Thanks in advance!
TestRobotwithBuffer.vcmx (12.0 MB)