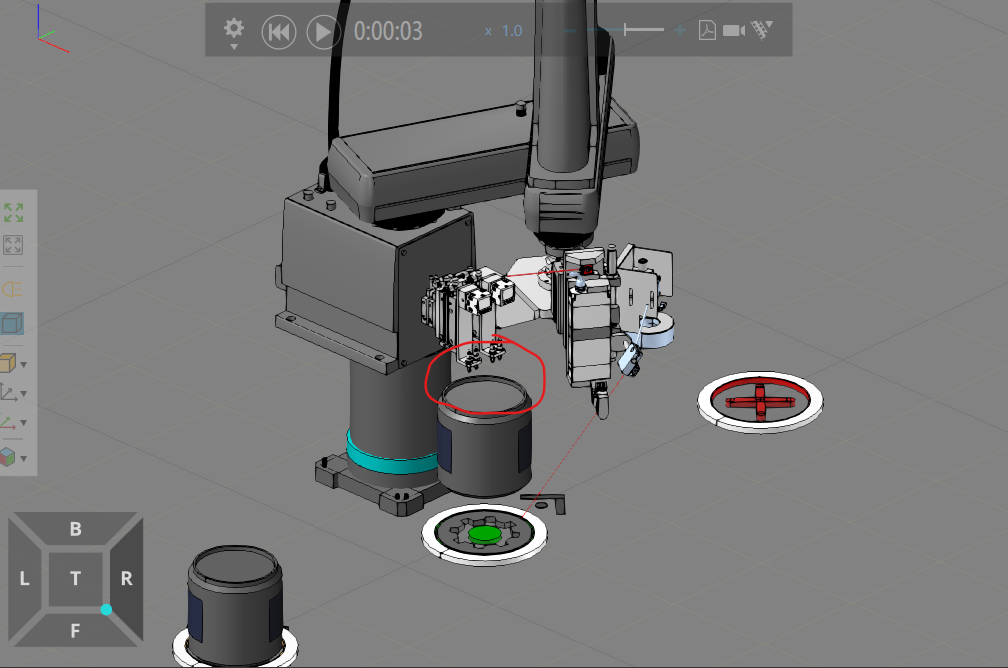
Hello all, I want the robot EOAT cylinder go down pick part and EOAT cylinder go up to release part. However, the cylinder go up without the part, how should I fix?
EOAT TCP.vcmx (624.5 KB)
Hello all, I want the robot EOAT cylinder go down pick part and EOAT cylinder go up to release part. However, the cylinder go up without the part, how should I fix?
Hello I tried to open this to take a look and see if i could help however the EOAT itself was not saved properly so it is missing when i download your file. Make sure you include components in your save not just original paths as we do share most paths other than standard eCatalog components.
EOAT TCP_Include Components.vcmx (2.2 MB)
Upload the original file include the customized gripper.
Hi Jbte, thanks for your reply. Please check my updates, hope you could help me fix the TCP issue.
Hi @victory Looking at this I believe this is more of a python issue than it is a robot programming issue. When I looked at the part with the modeling tab I noticed you have a very intricate GrippingLogic script to handle all of your EOAT movement. If you were using just Robot Programming I could be more helpful, but I think that since you are using a script like that to handle multiple single joint movements (Which I think is the way to go given how many independent grippers you need). Since I am not a python expert it may take a while to fully understand the script. Sorry
Hello jbte, thanks all the same. You already give me one way how to share components, and I will try to ask in Python catalogue.