Hi, I want my robot to scan a defined area (not point) and pick the parts and place it in a defined point. For ex: The robot should scan the area, find a box and pick it up. How do I do this?
Hi @joshuajoseph!
for a simple pick and place operation I recommend this video from the academy:
If you want to go into more detail and e.g. randomize the location of the boxes inside the area you might find these articles/videos useful:
Hope this helps!
1 Like
@cassian35 Thanks for your reply. These tutorials involves the use of sensors for the robot to pick randomly. What are the other ways to pick without having sensors? Vision cameras?
as you described: picking area
you can work with pick and place components from eCat, more in this help file:
this conveyor has two sensors and any part in between those sensors is considered inside the process.
1 Like
Is there a way to simulate camera vision in visual components?
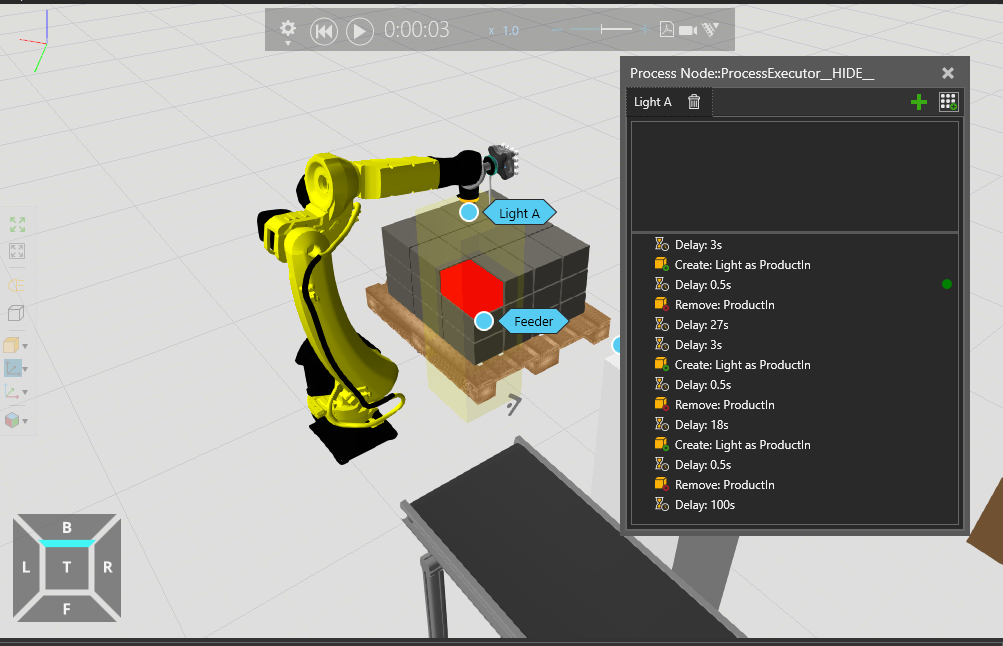
Hi there, you could get creative and create transparent blocks and then deleting them to simulate Light coming out of the camera
1 Like
Yeah this is a great idea. I mean getting the image from the camera and process it with example openCV?
Many of the Camera components in the eCatalog can take pictures from the simulation and save the image files to a given folder. You can then use these images as you wish with openCV or whichever tool you prefer.
1 Like