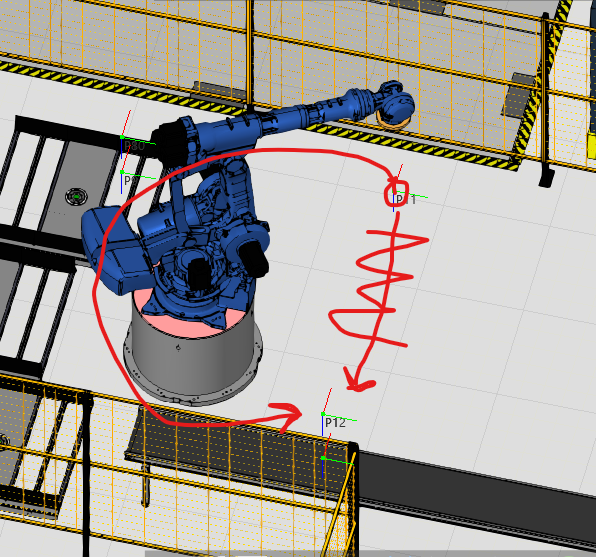
please excuse me I am still quite new to the VC simulation environment, but I don’t quite understand why the robot moves the way it should. I have a depalletizing task where the robot lifts boxes out of a container. It performs linear movements near the box and when placing it on the conveyor belt. Movements outside the container are performed by PTP. Now to the problem. Specifically, it concerns the points P11 and P12, which are both PTP. Instead of taking the short path from P11 to P12, it turns once around the axis to get to the point (see picture) Why is this so and how can I fix this problem?
Seems that J1 would go over limits with the short way. Usually these types of robots have -180 to +180 range for J1 and you seem to be operating in the rear arc of the workspace. You could try to adjust the mount angle so that the rear is located in an area where you don’t need to transition like this.
No worries. That’s what I thought when I was starting to study robotics and first only used robots in virtual environment. Once you start using robots in real life and maybe have a change to see what the internals look like you get better understanding that wires, belts and gears need space inside the robot and limit the joints’ motion quite a bit.