Hey,
I just programmed a simple pick and place operation.
After the first part is put into the box, the second cycle of the program is slower then 1000mm/s. The third cycle is even more slow and so on.
Is this a bug or did I miss something?
Hey,
I just programmed a simple pick and place operation.
After the first part is put into the box, the second cycle of the program is slower then 1000mm/s. The third cycle is even more slow and so on.
Is this a bug or did I miss something?
Hey,
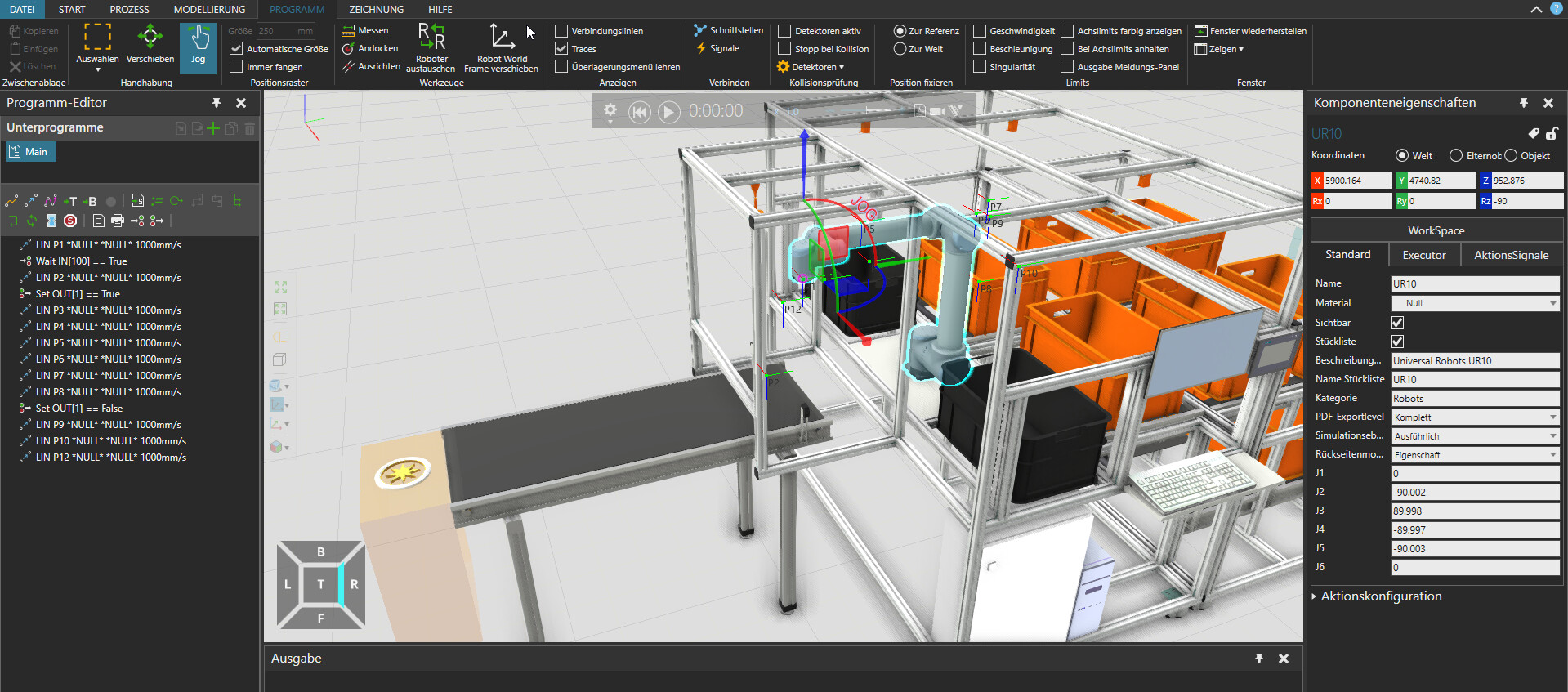
Try turning on “Achslimits farbig anzeigen”, you’re probably moving the robot outside of its limits with those linear movements. Any joint that exceeds its limits will be highlighted in red then. This has been the only case where I’ve seen the robot slow down. It can happen quite easily when you’re using only linear movements instead of P2P movements.
If you turn on “Bei Achslimits anhalten”, the simulation will stop whenever you exceed the limits of a joint.