Hey guys,
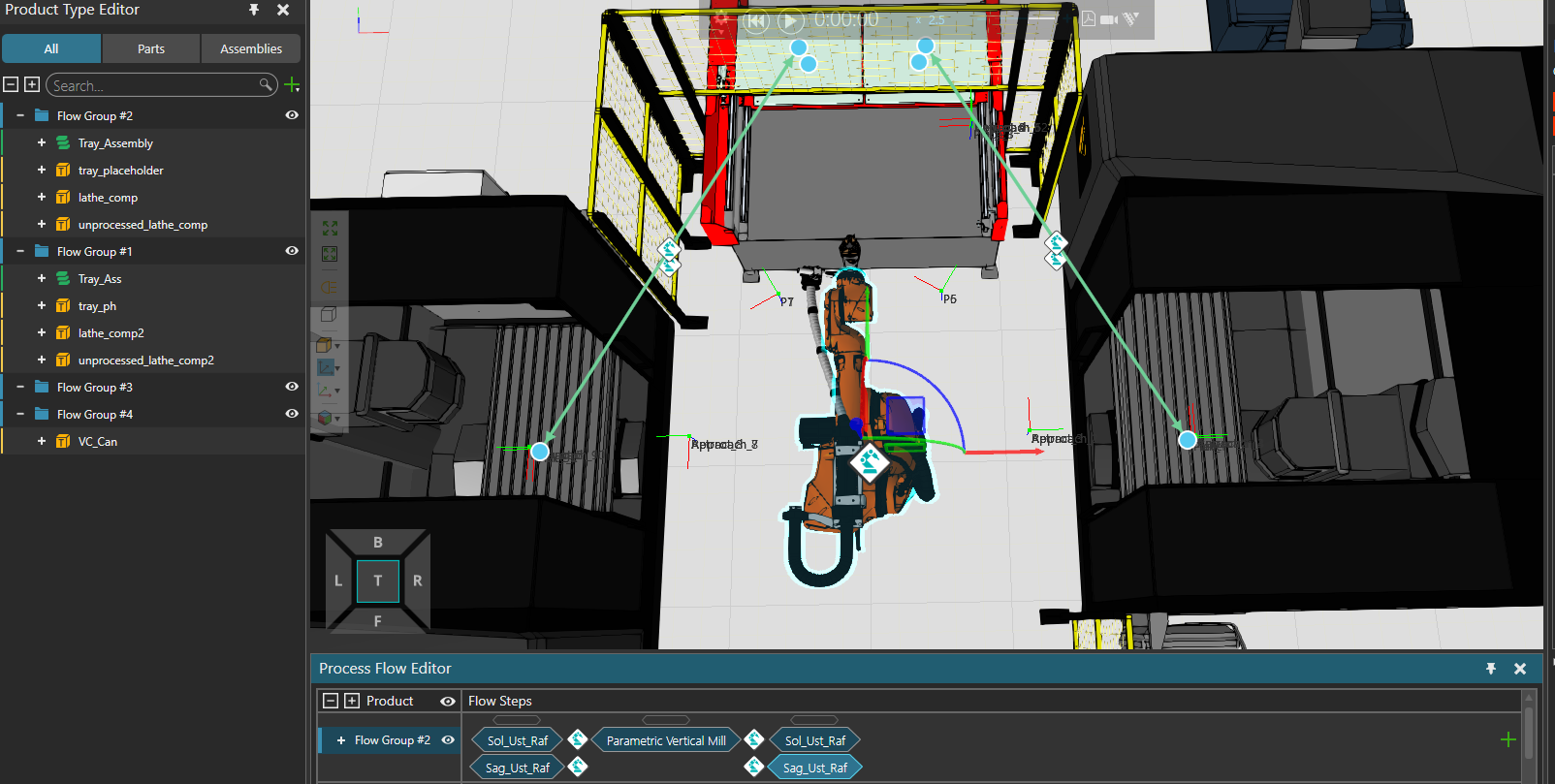
I’m trying to create a layout which has double gripper. Products are placed and fed in a pattern as an assembly.
Somehow first two cycles are offset (shifted as the robot approaches) from the product location. If i try to move those robot positions to correct points, this time remaining cycles are offset from the product location.
Here is a video:
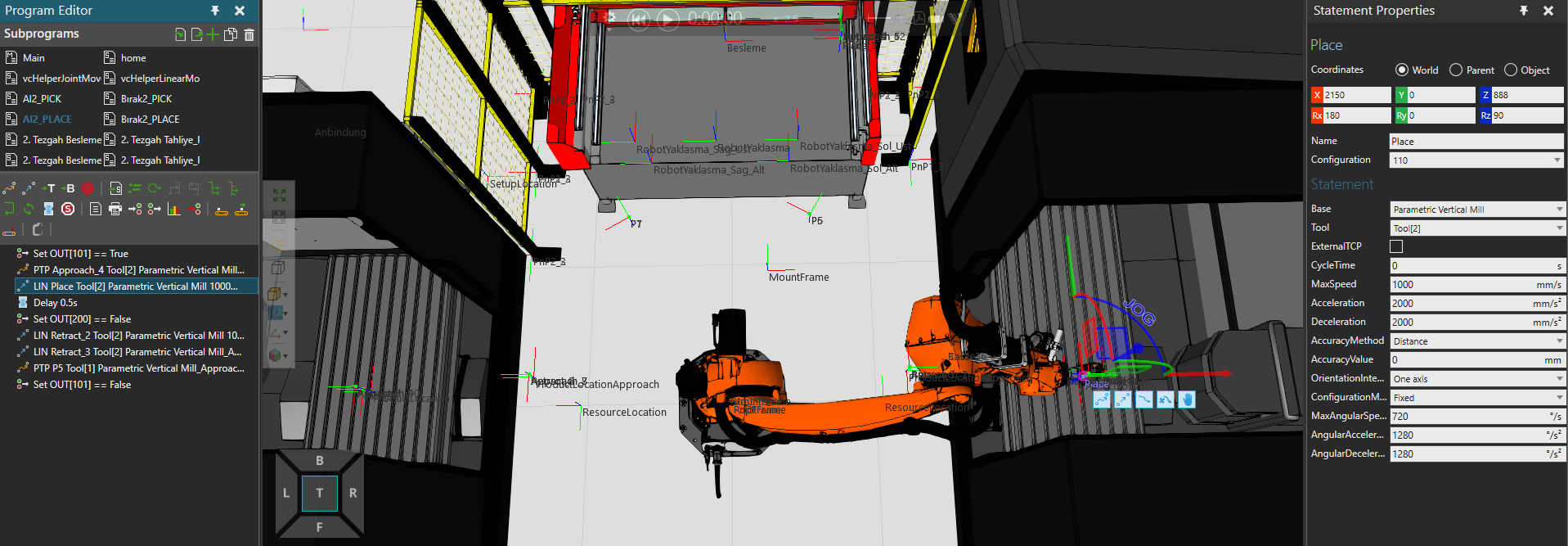
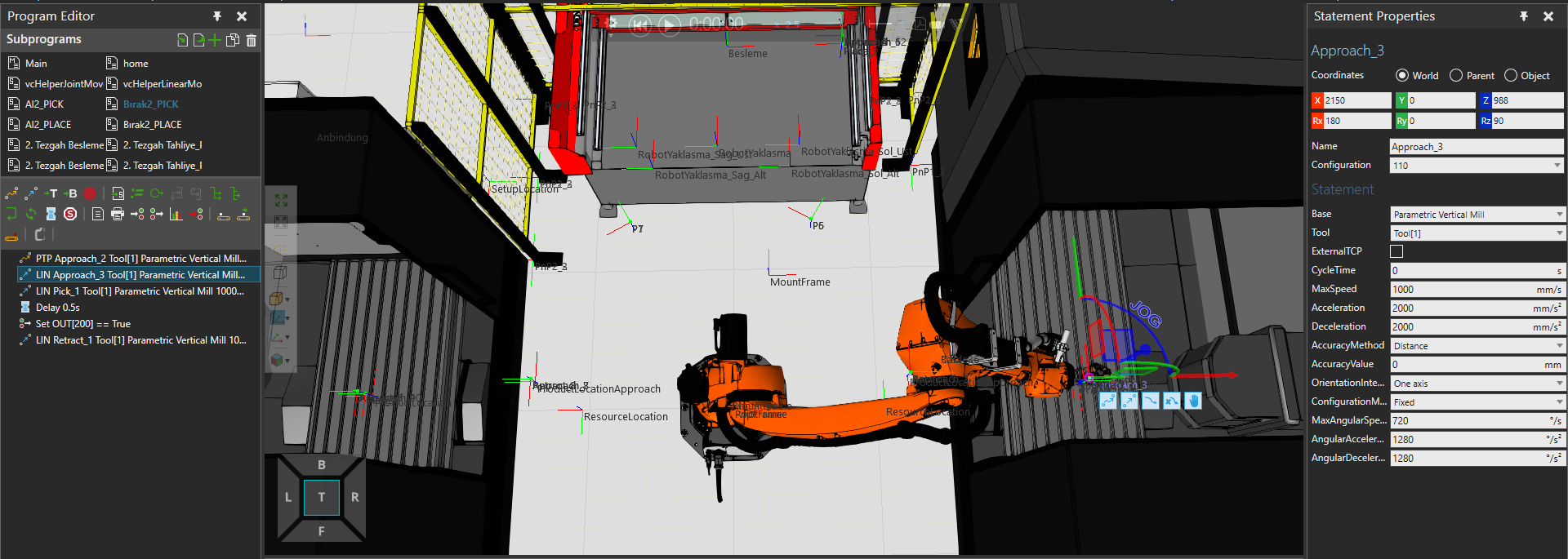
I recorded the routines generated by the robot transport controller and modified it a bit. I have 4 routines for each machine.
I don’t understand how, but routines seem to be shifting the base since i pick and place from multiple locations.
Same thing probably happens when i try to pick and place to the machine, but i only have one product location.
Here are some images: