Hello,
I have a question about making a statement through python, for start i know how to make add Motion statement for typical robot and how to adjust its position and parameters.
start = Routine.addStatement(VC_STATEMENT_PTPMOTION)
start.Tool = "TCP"
position = start.Positions[0]
position.Configuration = "cfx0"
position.PositionInWorld = comp.Pos_start
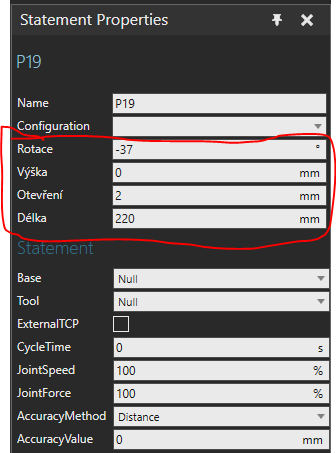
this is just my example from one of my tests. As i wrote, it’s working for basic e-catalog robot but i prepared my own 3 axis robot which has X and Z transitional axis an Z rotaitonal. I would like to achieve for python program to generate values “Rotace,Délka,Výška,Otevření” in PTP.
Except i dont know how to add these values through python and for now my code only does this.
with this code:
from vcScript import *
comp = getComponent()
executor = comp.getBehaviour("RobotExecutor")
program = executor.Program
subRoutine = program.findRoutine("Place")
for i in program.Routines:print i.Name
def fillSub(Routine):
#Routine.clear()
start = Routine.addStatement(VC_STATEMENT_PTPMOTION)
position = start.Positions[0]
#statement1 = Routine.getStatement(0)
pass
if not subRoutine:
subRoutine = program.addRoutine("Place")
fillSub(subRoutine)
else:
fillSub(subRoutine)
Any help would be greatly appreciated ![]() .
.