Hi everyone.
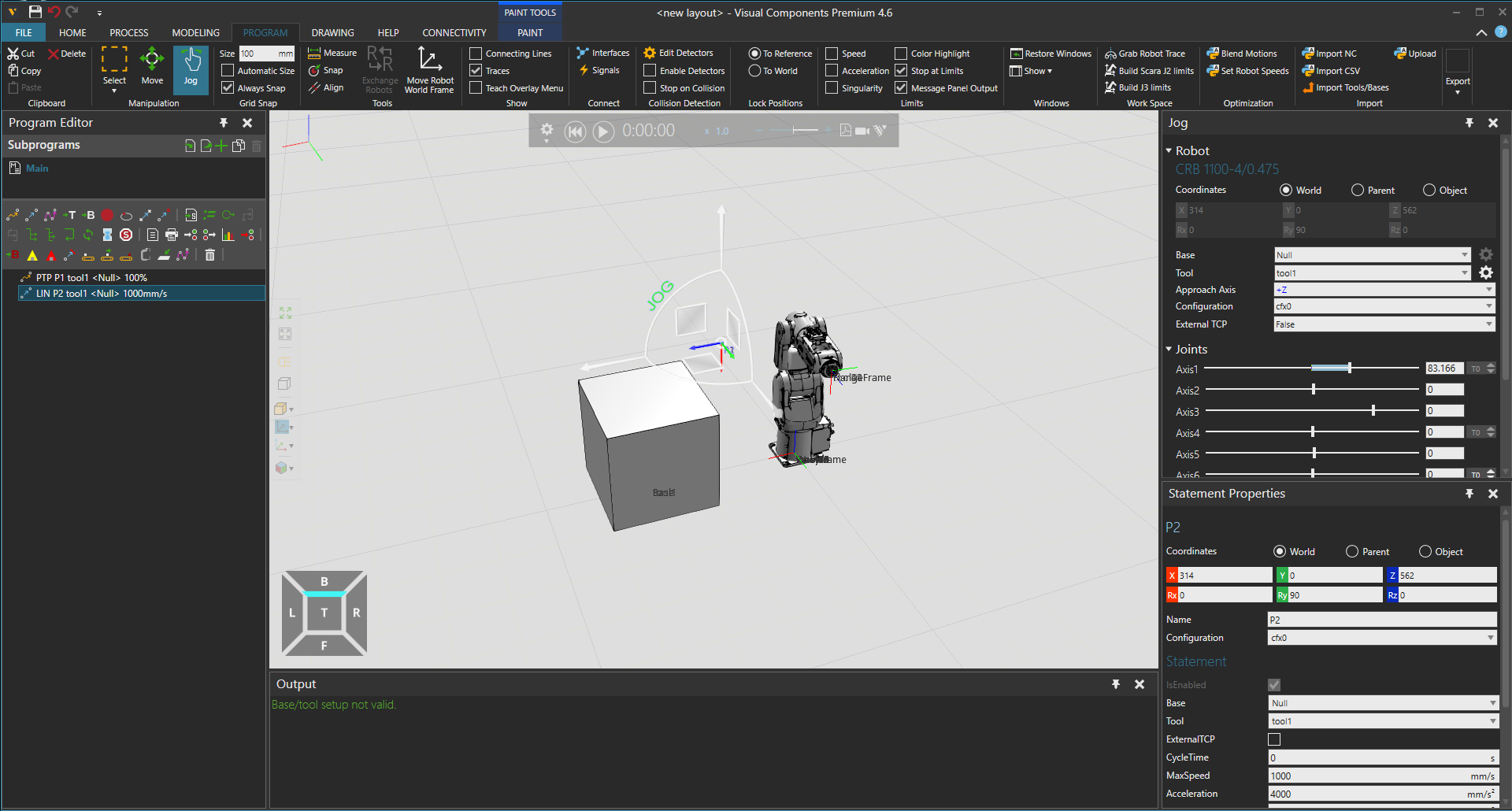
I was wondering why when I click on a point on the Program Editor with the Jog Manupilation selected, the robot doesn’t go for the point as it has always done before. I also get that Jog axel over the robot. This is giving me struggles when running the robot routines. Can anyone help me here?
Thanks in advance.
One scenario where Jog handle is like that is when you have invalid base/tool setup. That should get printed on the output console too. In this scenario selected base and tool are both attached to robot flange (or its child) or neither is attached to the robot flange (or its child). In other words robot’s motion doesn’t affect the offset matrix between base and tool frame (target matrix) and thus the frame configuration is invalid.
I see you have tool changer rack there so I’m guessing your tool frame is attached to one of those tool components but the tool component is not attached to the robot. So either attach the tool component to robot to make frame configuration valid or do not attach the tool frames to tool component but to robot flange (mountplate node). I would go with the latter option and only use the inbuilt tool frames on the robot. Just leave them attached to robot flange (mountplate node) and configure their position to correct place when you have tool component attached. That is pretty much how you work with the real robot which has tool frame available even if the actual tool may not be mounted on the robot.
-k
1 Like
I have a similar robot on the otherside and this one is copied from the other one, so I guess that was part of the problem too. I’m understanding now how to fix it, it makes sense, thanks for the help.
1 Like