Hi there,
I’ve a robot positioned in a track to do a path statement in a piece that is really big, requiring both the robot and the track to move simultaneously so that the movement can be done. But for some reason, only the robot moves, the track does not.
Is there any special parameters/option that need to be set so that both can move simultaneously?
Thanks
The positions in the path statement need to have external axis values. See if the attached layout helps, but note that in my layout the positions in the path are not continuous so robot and all other axes will stop at position. Be aware the path statement itself has a smoothing feature similar to the one in RobotStudio for external axis values.
Demo - Path Statement with External Axes.vcmx (819.0 KB)
Hi Zesty,
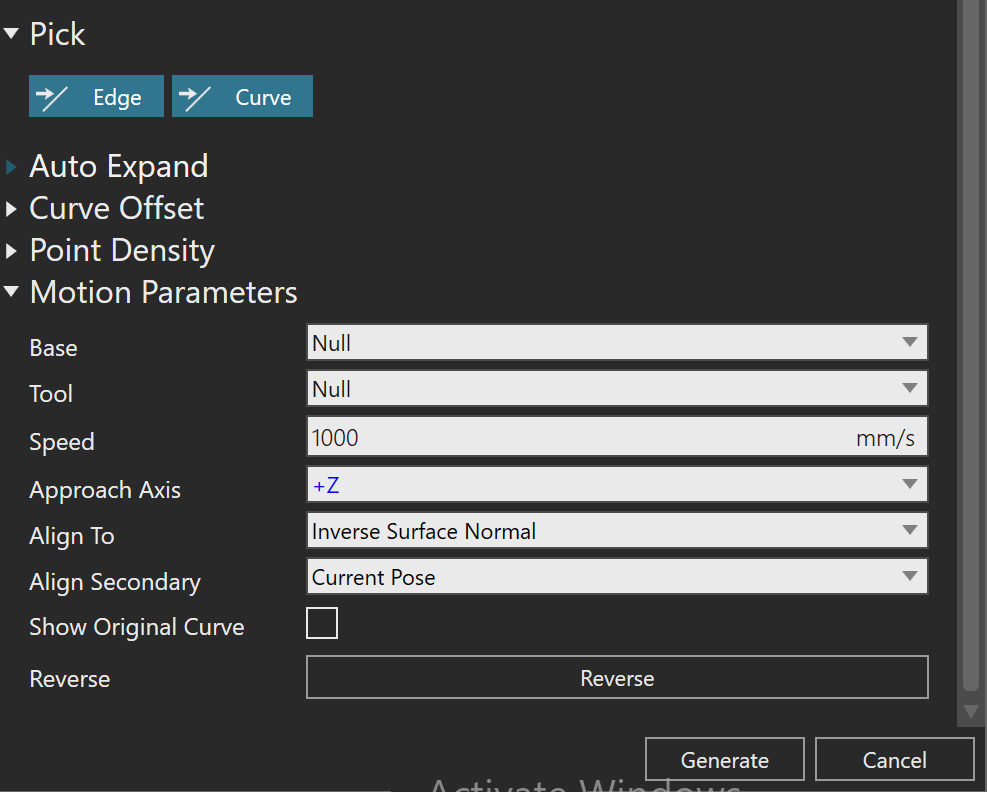
thanks for the quick answer! Unfortunately i couldn’t find the option to add an external axis to the path statement positions. Is this option located in the “Select Curve” ?
I’m attaching my example model and a screenshoot of the “Select Curve” menu
WeldingSimultaneousTest.vcmx (1.1 MB)
Thanks,
Luca
Select Curve is when you are creating path or redoing the selection of positional data. After the path is generated, you can select the path statement, and then in the path statement properties you can perform smoothing.
The E values for points in path are automatically added for you based on the external axes connected to the robot. So in my layout, the robot is connected to track and imports 1 axis, and is remotely connected to positioner and imports 2 axes. The external axes have to be connected to robot prior to teaching positions. Also note that my path statement references a base frame which I attached to the workpiece.
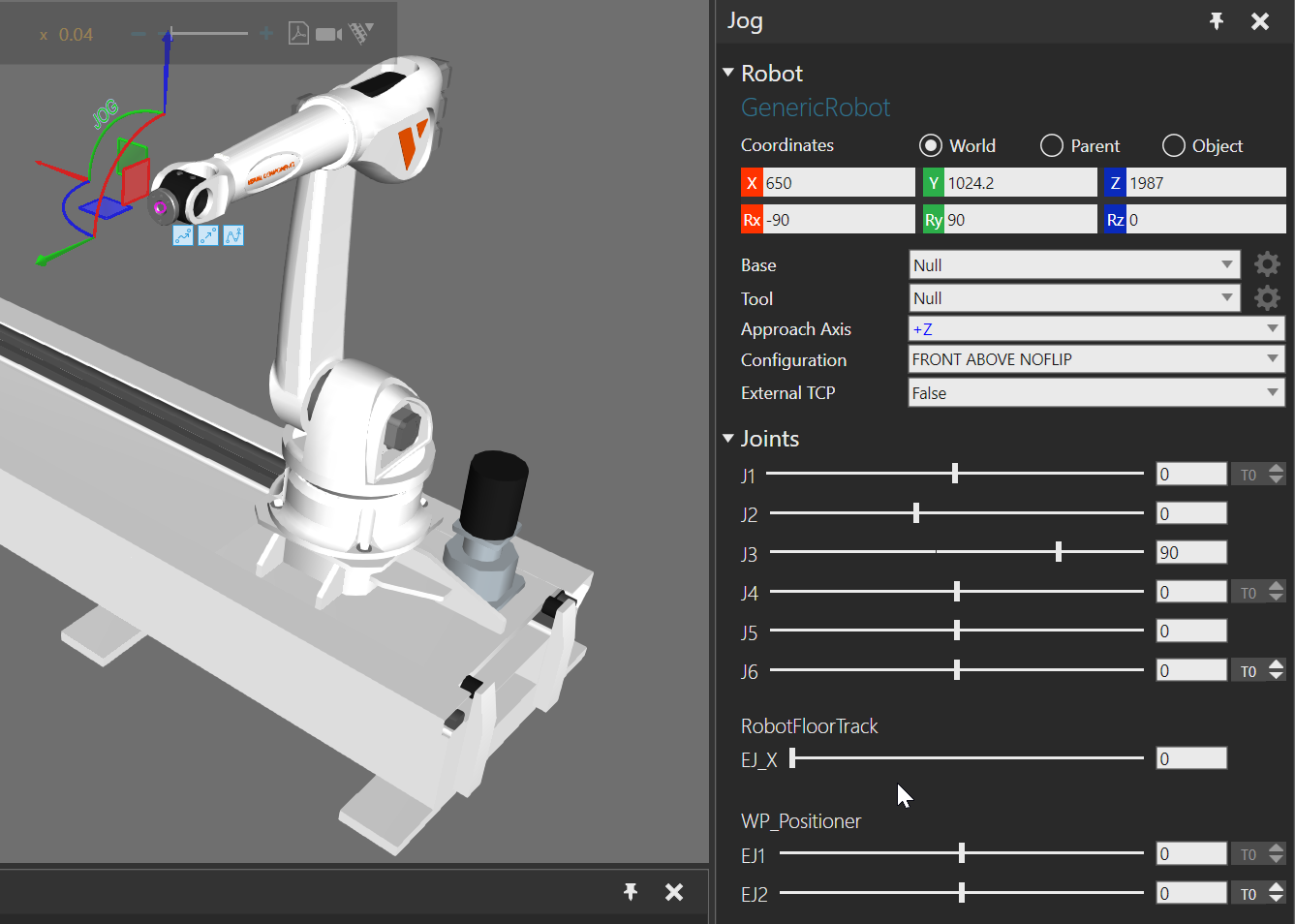
In your layout, just add a linear motion statement and access its properties. If you do not see E1, E2, etc. properties for external axis values nor see external axes listed in the Jog panel of selected robot then the axes are not known to the robot/controller.
Did you take a track from the eCatalog and then use PnP to connect robot to track? What some users sometimes do is snap robot to platform on track, and then attach robot to track. That does not mean the robot inherently knows to use track as base kinematic system nor does adding workpiece positioner to 3D world automatically export its joints to the controller.
What you described in your op sounds like the robot is not connected to the track. You can verify that, of course, by checking the Jog panel and seeing if new positions have corresponding E properties for external axis values.
Jog panel
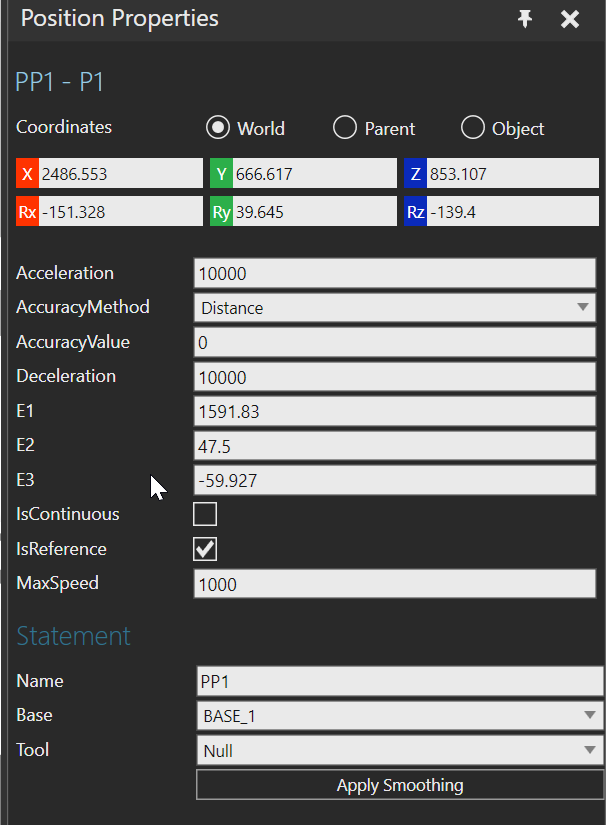
PTP statement properties
Path statement properties
Side note: Looks like the left (<) and right (>) arrow key shortcuts for stepping to points in path is bugging out in VC 4.2.2, so for selecting points that are not marked as reference points would need to be directly selected in 3D world to edit them individually.
Got it!
Actually the robot is connected to the track and positioner just like yours, but for some reason I’m having to set the E values manually for each point in the path statement, otherwise its set to zero and the track does not move.
Is there a way for the values to be set automatically?
I’m attaching the model again so youy can have a reference
WeldingSimultaneousTest.vcmx (1.1 MB)
Many thanks!
Luca