Hello,
I am recording and executing my robot motions and touching up as needed. My problem is that when I go into one of my subprograms the points show up in the wrong positions.
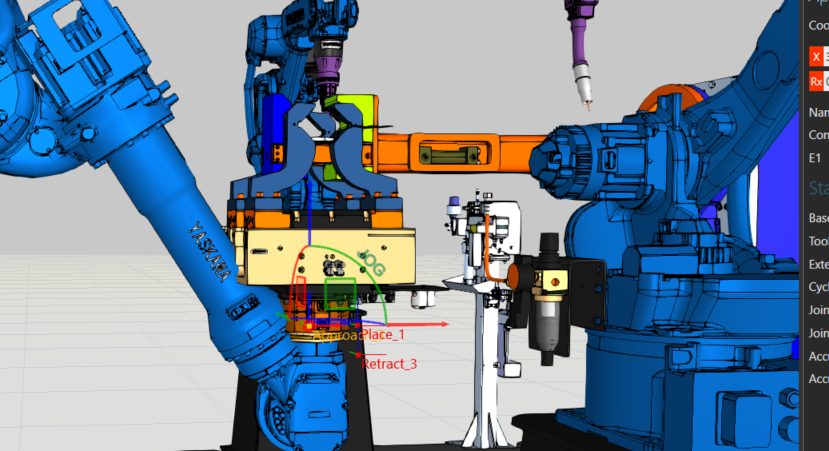
When I run the simulation the robot follows roughly the points that I taught it but I need to touch up/add a couple points which I can’t do because every time I go into the program the points are in the wrong spots.
Has anyone run into this? or would anyone have any ideas on how to show the correct points?
Thanks in advance!