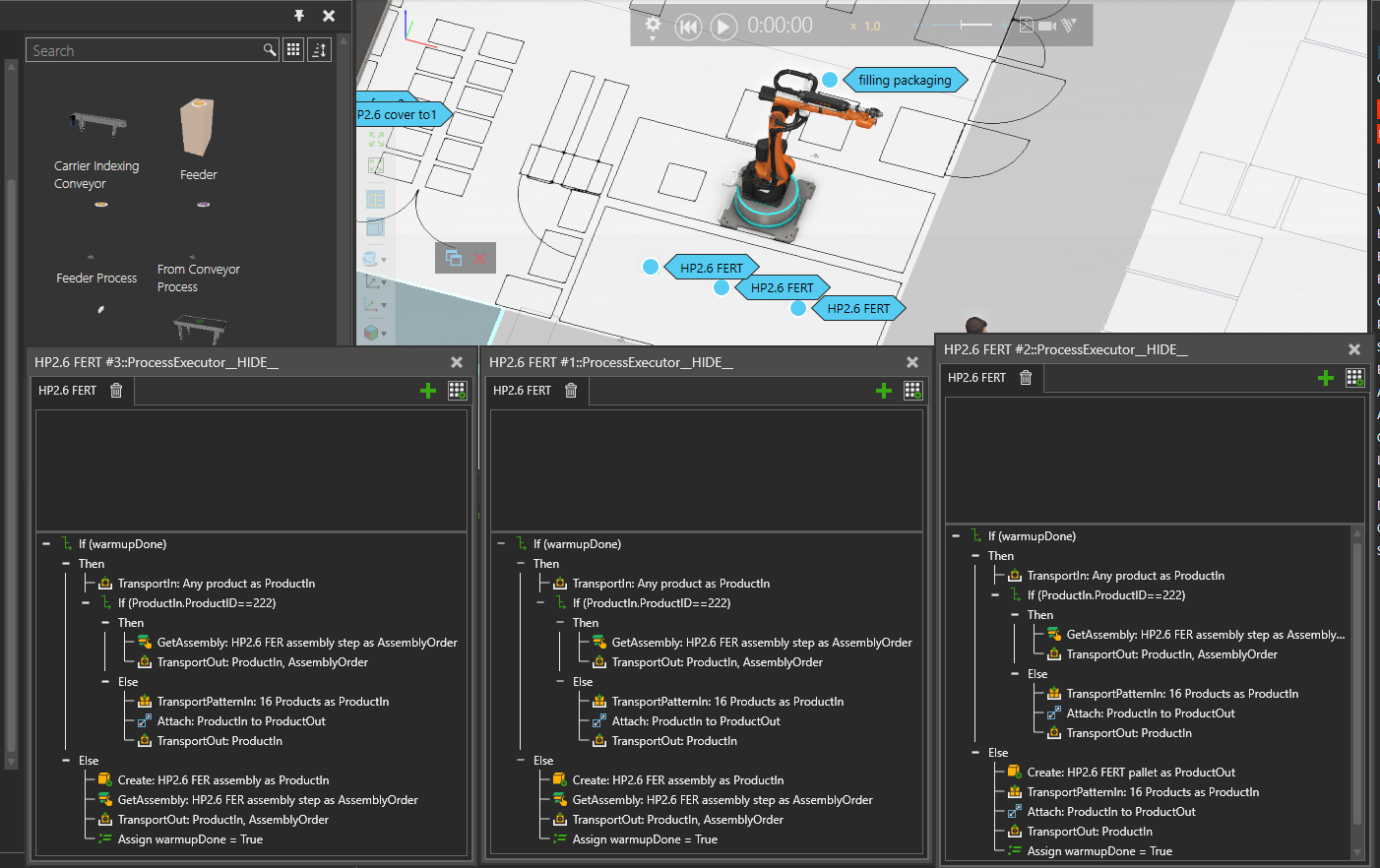
I have to prepare process when I have 3 pallet positions (2 full pallets + 1 empty). Robot should take boxes from full pallet put them on the oposite process node for delay (simulating filling process) and put box on empty pallet.
If I remember correctly, robot was taking the boxes only from middle possition. (When all boxes from middle pallet were processed, pallet was removed and full pallet from left entered the middle process for robot depalletizing). Hall_I_second_phase_unfinished.vcmx (6.3 MB)