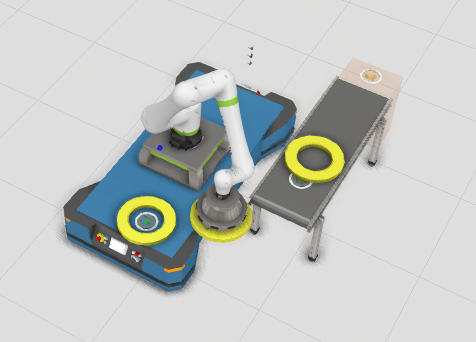
I’m trying to accomplish a Storage and Retrieval system with a robot on an AGV. I need to pick up a stack of parts (one at a time), and place them on the AGV. And then, take the stack to another location, and place the stack in a bin area.
I’ve tried attaching the process node to the AGV, but it causes problems when the robot tries to place on the node.
Any help would be appreciated!