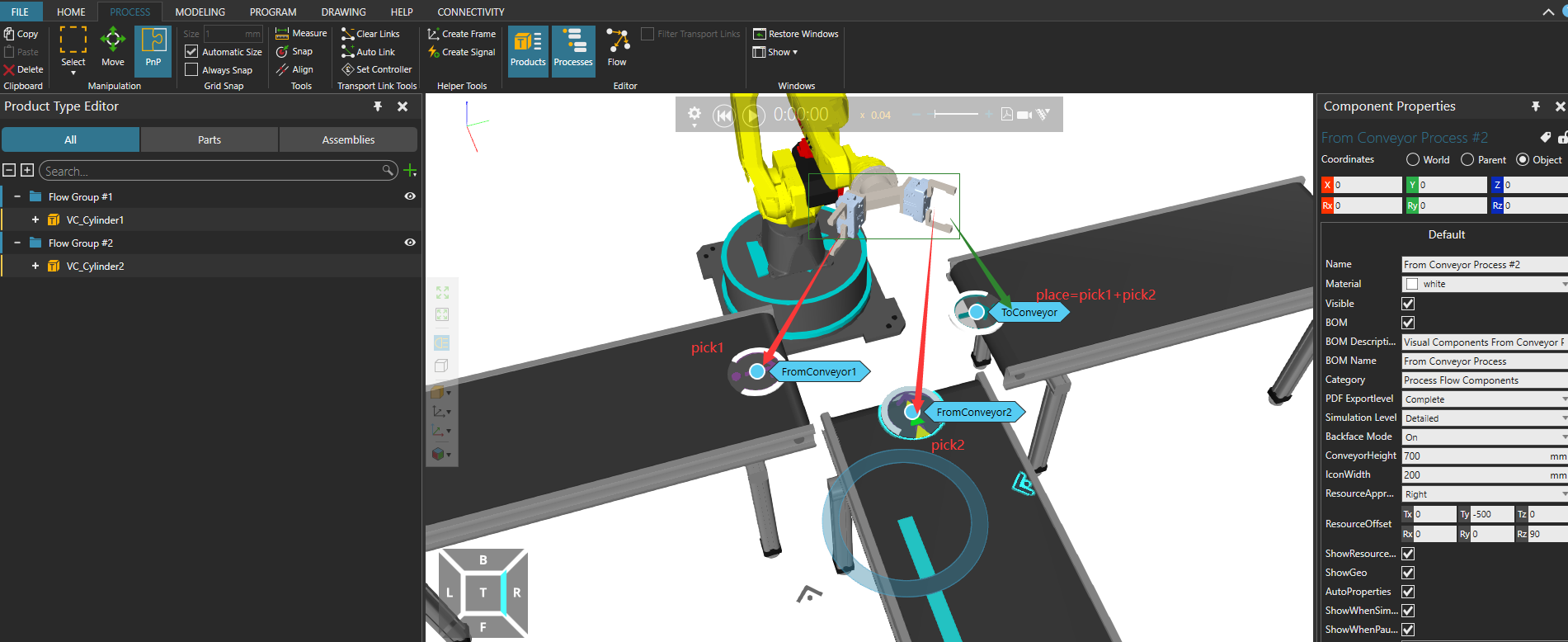
Hi, I’m having trouble making a multi-claw grab,How to use process to grab two objects and then release them
MultiPick.vcmx (1.3 MB)
Hi, I’m having trouble making a multi-claw grab,How to use process to grab two objects and then release them
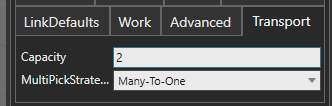
In Robot Transport Controller:
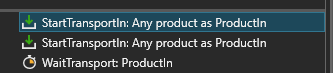
Instead of TransportIIn-Statement in ToConveyor-Process:
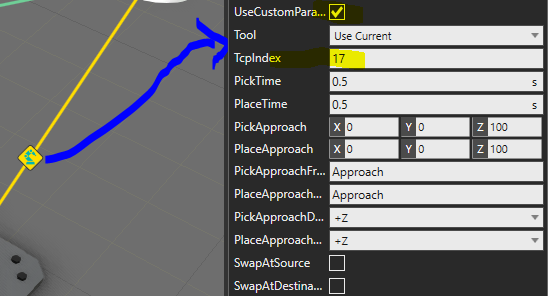
In TransportLink properties you choose your right TCP-Index:
I tried it but it didn’t work. Could you share the demo you made,thank you
Robot MultiPick_Example.vcmx (219.5 KB)