Hi,
i?m doing a robot program with a AUBO i3 and I teach it a specific trajectory. I’m succeed to stay in the reachability envelope of the robot and I’ve tried to give it a trajectory that could follow quite easily. However, the problem is that when I try to pass it from two points that are very close to each other and seemingly easy to reach, it does a 360 rotation around its own axis, thus wasting a lot of time. Someone has a solution to this issue? I’ve left the model in order to be more clear (the problem appear for example when it try to enter in the Rotational Ispection 1 sequence statement)
Thanks in advance
Prova.vcmx (110.7 KB)
hi
Increment Joint Value:
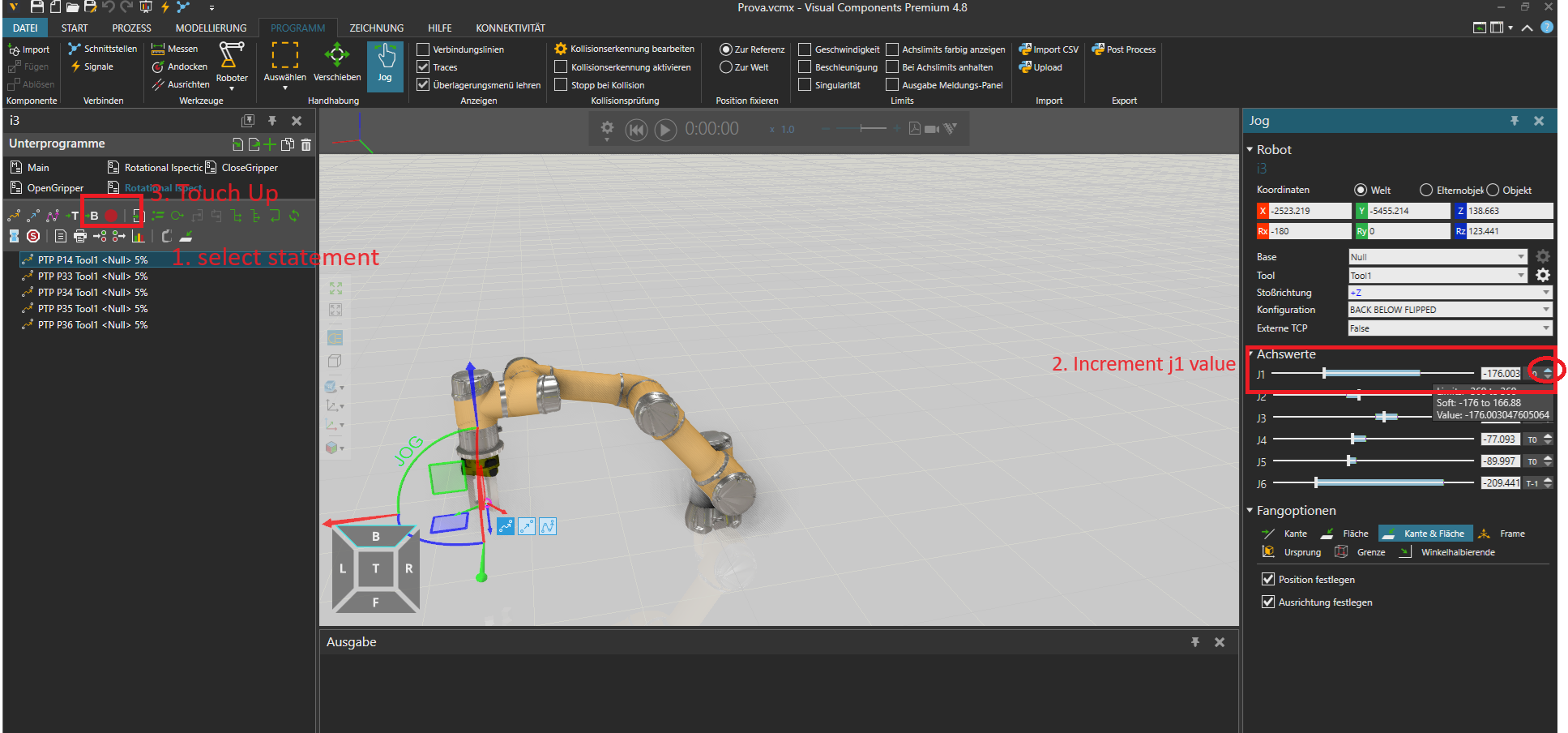
see this in your changed layout
Prova_new.vcmx (264.2 KB)
this is explained on academy in the following tutorial " Basics of Robotics" last chapter “Robot Joint Turns”:
1 Like
Perfect, thanks for your help.
New to visual components. When I make a simple trace of a square in VC and use the postprocess for Yaskawa. When uploaded to the robot controller the path will drift in the +Z direction with following the X direction of the trace. The trace should be staying on the same plane. Any idea what would be causing this?