Can you stop the motion of a generic robot within pm when it placed the product on a process node? And can you attach or grip a product which is on that process node? I want the two robots to put those 2 parts together and spin them around in a circle motion, so a third robot could execute a weld motion to stick the two parts together.
Probably best to use the RunRobotRoutine command instead of the automated transportations to get this working.
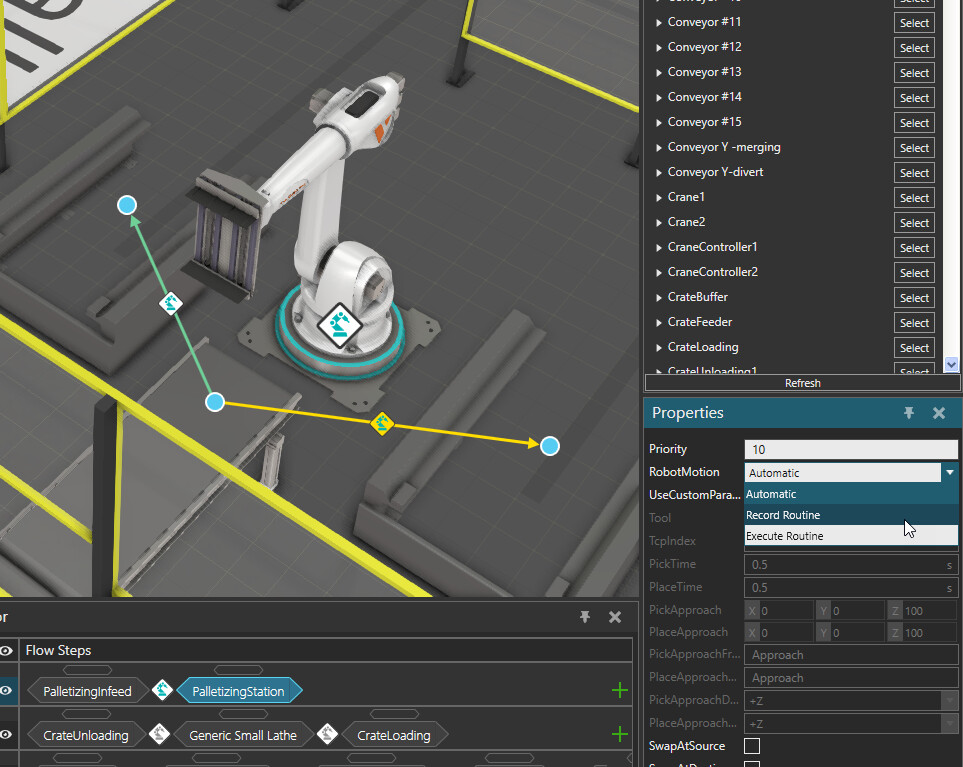
Alternatively you can override the motion in the Program tab.
-
Choose “Record Routine” in the Transport Link’s settings
-
Let the simulation run for one cycle
-
Choose “Execute Routine” in the Transport Link’s settings
-
Delete the last point in the “Program” tab
That’s how I did it for this example.