I have a gantry STEP module, and I modeled it on Template 3-Axis Cartesian, but there were some problems with the simulation.The Gantry had no problem in the first three cycles,but started having problem in the fourthGantry Robot.vcmx (11.1 MB)
.
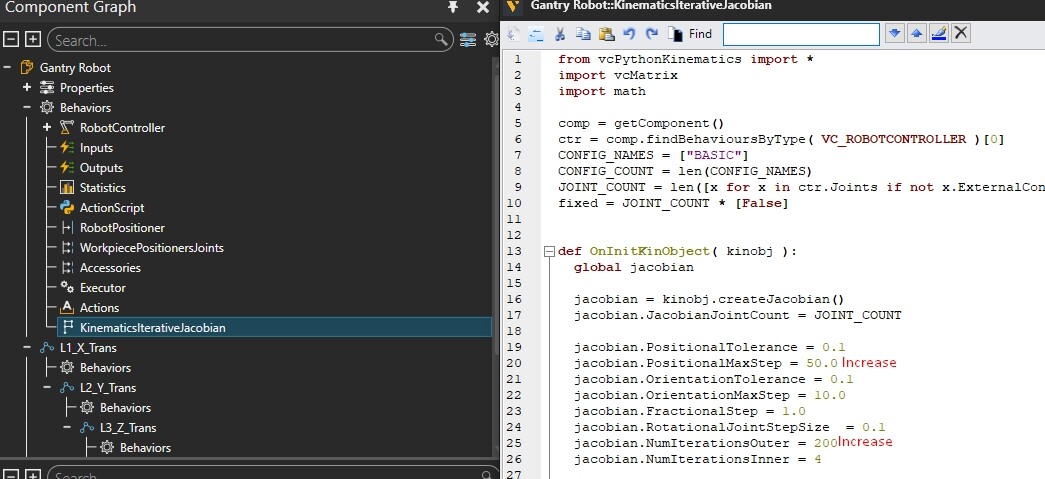
The jacobian kinematics solver is likely running out of iterations since the working area is large.
I quickly tested your robot and increased the position step size and maximum iterations from the script. Now the robot finds the positions better.
I suggest playing around with the parameters to tune those to your robot. Setting the values too large could slow down the performance or cause instability in smaller motions.