roboguide_connect_r1.vcmx (1.7 MB)
I want to make a data of robot handling which is same as " Fanuc Connectivity Plugin | Visual Components Academy".
But something is wrong with my simulation data, The fanuc robot doesn’t move a product to Lathe.
roboguide_connect_r1.vcmx (1.7 MB)
I want to make a data of robot handling which is same as " Fanuc Connectivity Plugin | Visual Components Academy".
But something is wrong with my simulation data, The fanuc robot doesn’t move a product to Lathe.
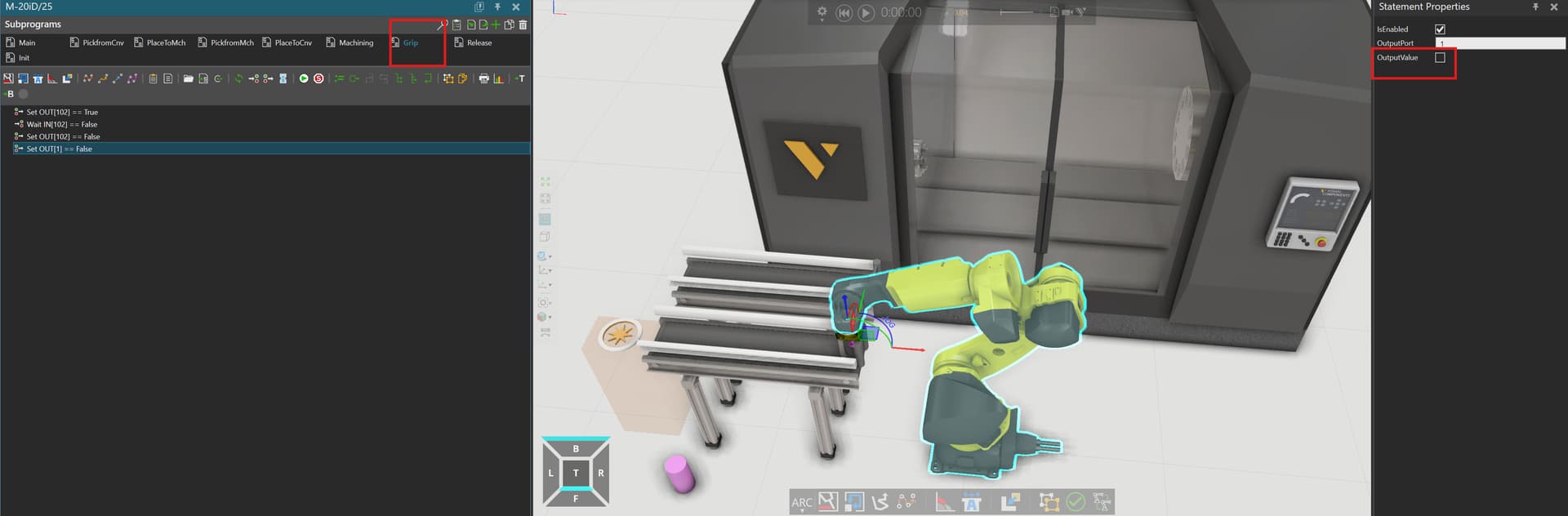
If what you really want is a grab, then why are you using OUT[1]==False again? By all rights, it should be OUT[1]==True here! ![]()
Oh…I didn’t notice it.
I appreciate for your help.