I have a simulation with a robot. The robot receives the location for his moves via other components and the instructions are processed in a python script.
At the start, the simulation can run at x10 speed without problems: GPU utilization ±40% CPU 30%
After 1h of simulation time, the performance of the simulation slows down. This is only the case for the robot movements, when the robot is idle, the other actions are fast. The framerate is reduced a lot during robot actions
After 4h of simulation time, it is even impossible to have the simulation running at 1x speed during robot movements.
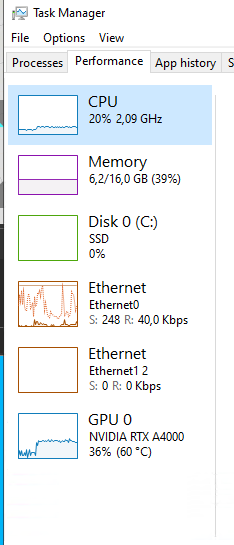
- GPU utilization 7% during robot motion, 40% when robot is idle
- CPU utilization 12%-13% (1core at 100% during robot motion), >20% with robot idle
In task manager, it is really clear when the robot is idle:
Additional information:
Visual Components 4.6 Premium
Does anyone has an idea what could cause the reduction in performance and how to solve it?
From my analysis it seems like some internal behaviour of the robot executor is single threaded and takes longer to calculate.