Hi Team
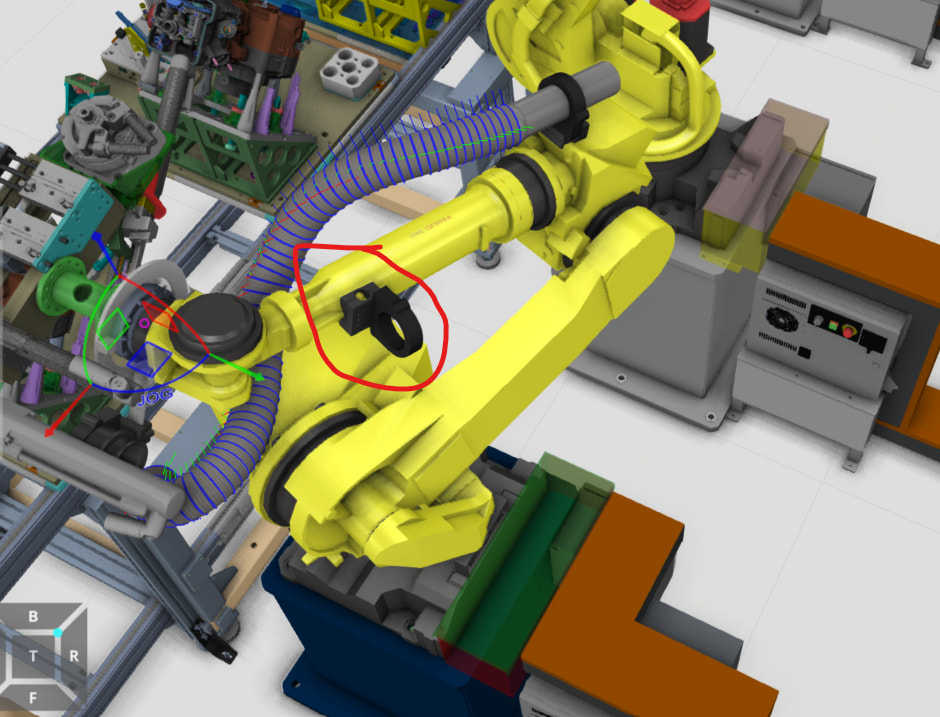
I am facing the issue of clamping the robot dresspack at J4 axis, I am getting the option of directly snap to J6 Offset. i want my dresspack to be routed through J4 axis clamp and then attach to the J6 Offset. Can anyone help me in how to do it this for simulating the cable. Picture of the work is attached below. If any other information is needed please let me know.