I have a problem, the robot does not take the object. I have another robot with a similar task and it takes an object. Why so and what to do?
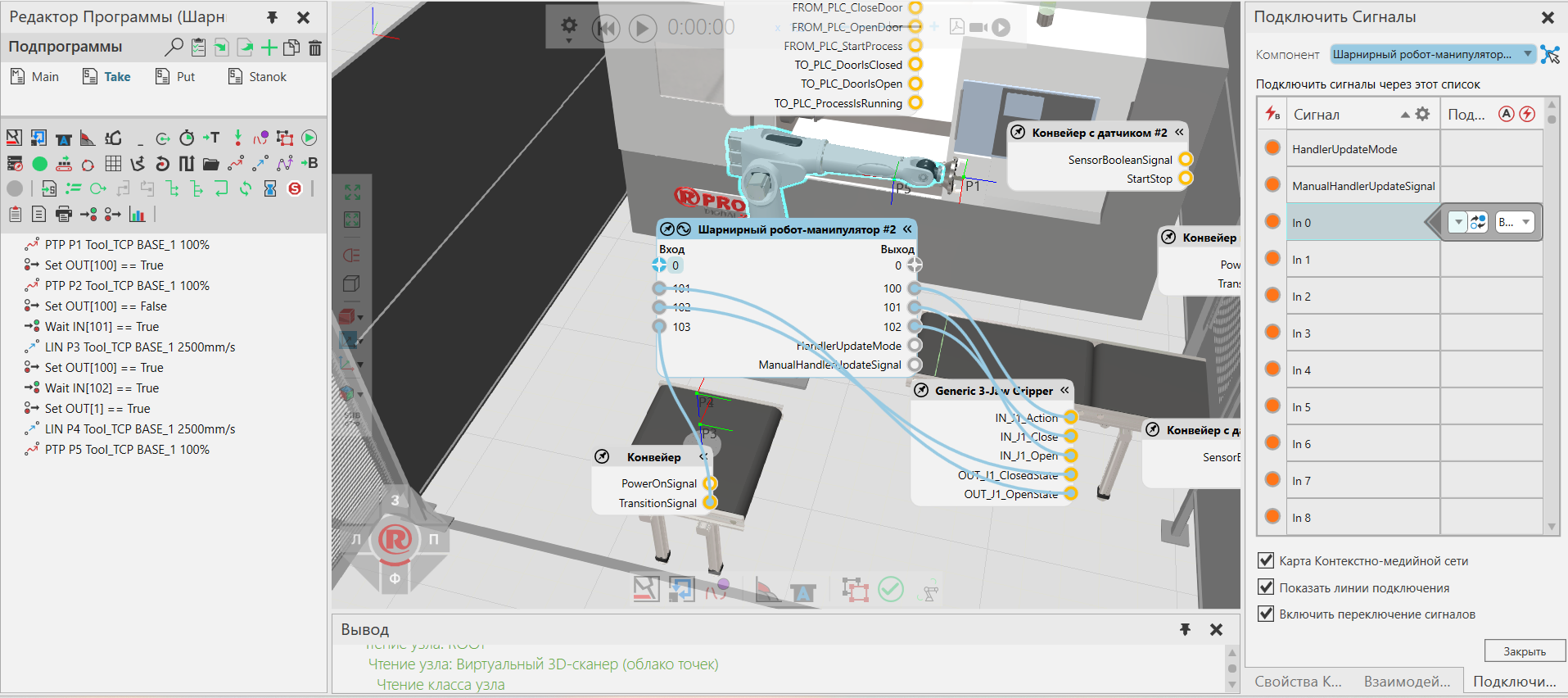
Hi, which Output of your robot is for grabbing and releasing? 100 or 1. look in the config an check the controllvolume of the Robot and the TCP, where the controllvolume should be around. The object you want to grab must be in this Volume.
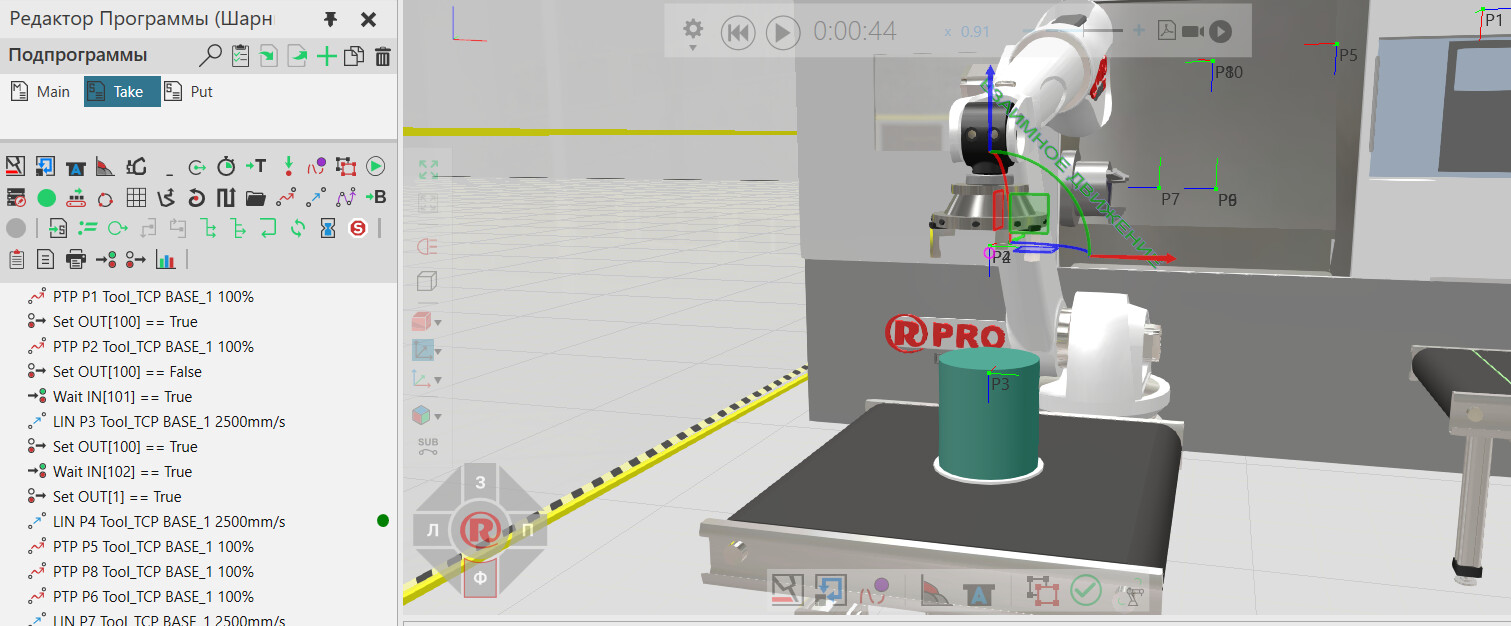
It seems that your P3 point, which is the grabbing point, is not on the upper surface of the cylinder, but a little lower. What you need to know is that the two most common ways to grab a motion detection component are: 1. Using a ray detection component; 2. Using volumetric collision detection. Both have a common requirement, that is, they both need to be the surface of the component being inspected. That is, you need to place the P3 point at least slightly above the upper surface of the cylinder (essentially, your TOOL coordinates need to collide with the grabbed component within its detection range). ![]()
It would be easier to check the layout directly, you could leave required components.
Thanks)) Problem was with point P3. Now it take it