where is the origin of world coordinates in VC ? how to redefine the coordinate?
why the robot reference to this coordinate not the robot world coordinate?
hi,
go to options → display:

You can switch between world and parent (robot world frame) coordinate system:
WORLD:

PARENT:
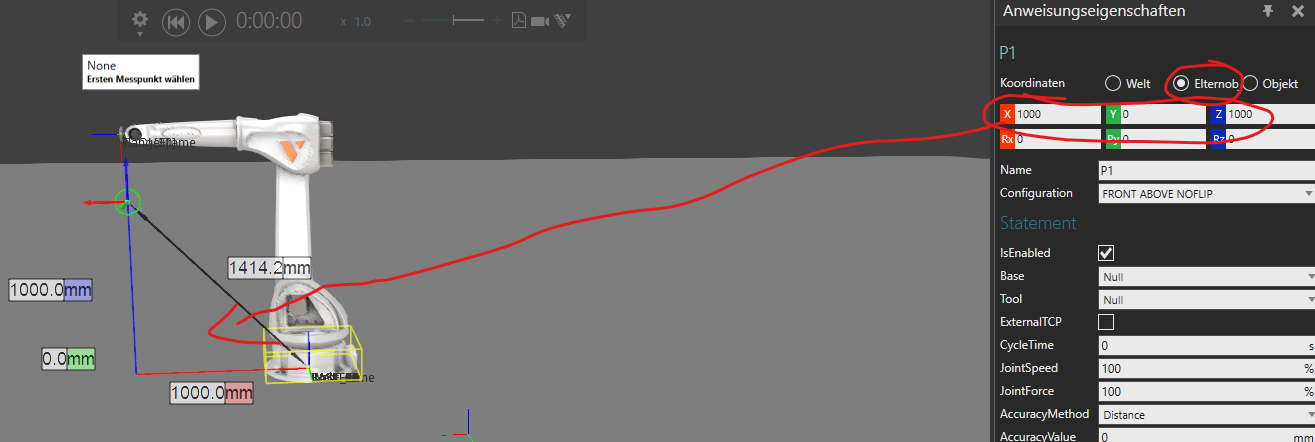
does it mean when switch to PARENT . the X Y Z A B C value are refered to the robot WORLD coordinate?
my colleague give me points data in WORLD , so if i want to know the robot points, he need to switch to PARENT and give these point value to me ,right?
what if I set the robot WORLD Frame same as the world origin frame ? so that i can directly use the XYZ value in WORLD?
Most easy way would be, set robot’s origin to
XYZ: 0.0, 0.0, 0.0
WPR: 0.0, 0.0, 0.0
Then they will be in the same coordinate system.
chapter 4. Robot World Frame…
2 Likes