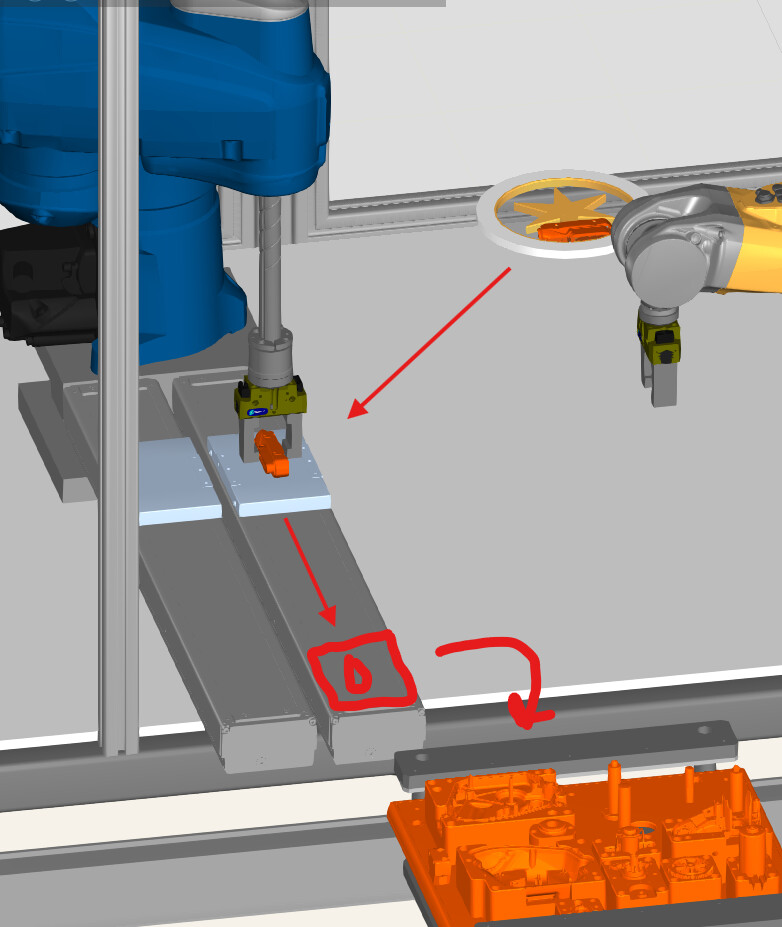
I want to pick up a part from the feeder with the Scara robot, then I want to place it on the nest of the linear actuator and transfer it to the second position where the 6-axis robot will pick up the part.
The problem is that I can’t connect the part to the linear actuator.
The part stays in place and doesn’t leave with the nest.
The easiest one to do this is probably with an assembly and process modelling. I would recommend to check some basics of process modelling and then assembly itself. There are also some palletizing layouts within the software in Layouts > Layout Templates that you can reverse engineer.
You don’t really have to check all the videos, please see the video titles to see whether the video would be useful in your task.
I would recommend to use “interpolating transport” first to get the logic going on and after that use actual robots to perform the movement.