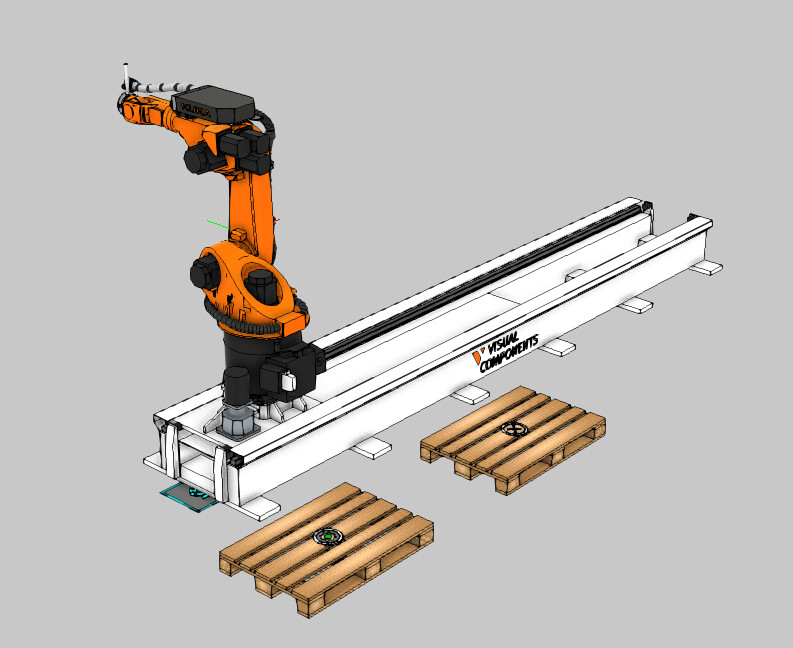
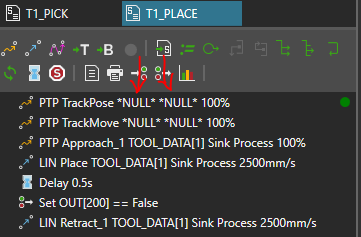
When I “Record” (the working) transport between the processes and execute them via “Execute Routine” the first two points in T1_PLACE are not reachable for the robot.
Hi guys, I found a way to deal with this problem.
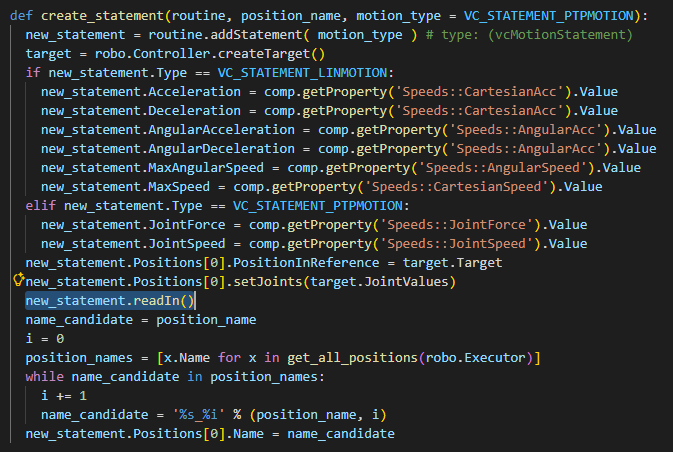
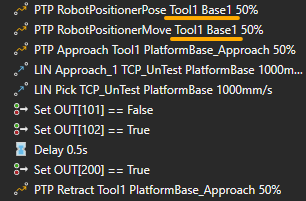
In the create_statement block of the Robot Transport Controller ResourceLogic script, <vcMotionStatement>.readIn() helps record the statement using the currently active base and tool frames.