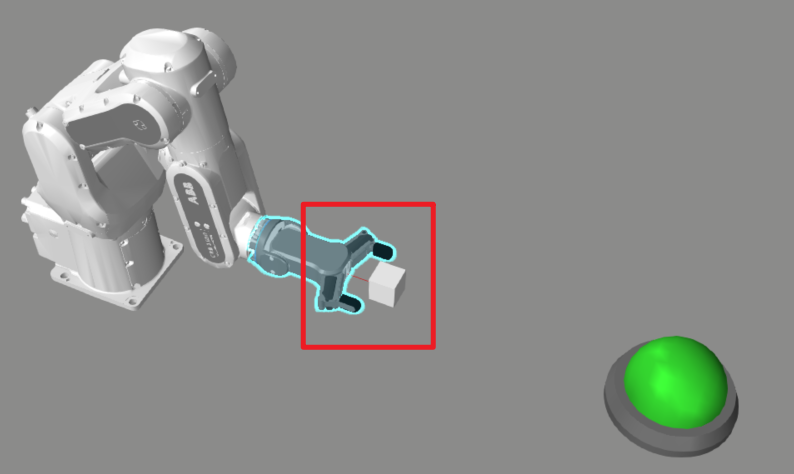
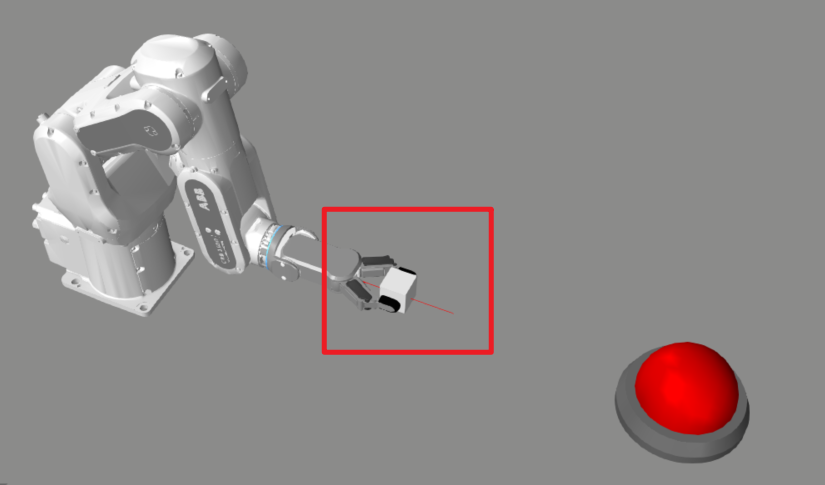
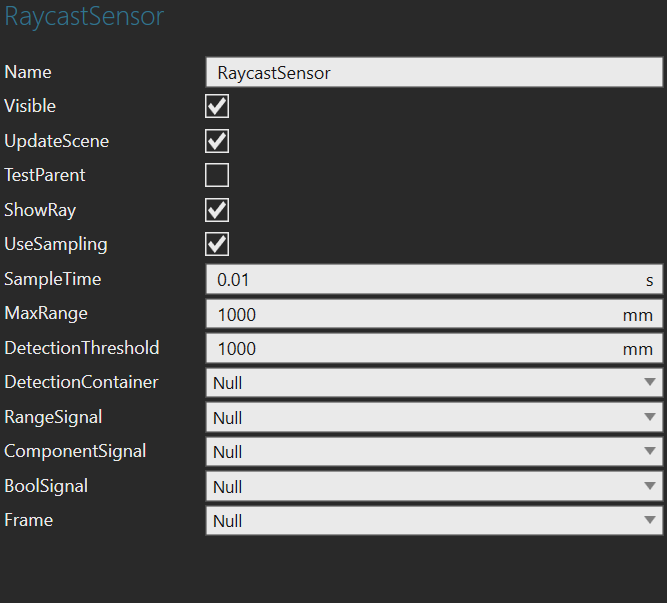
There is a RaycastSensor on the robot’s gripper. When a component is detected, it will be triggered. However, when the robot picks up the component, the RaycastSensor will not be triggered. I think it’s because the container of the component has changed. Is there a way to keep triggering when a component is detected?
Thanks.