Hello VC users,
I have a question.
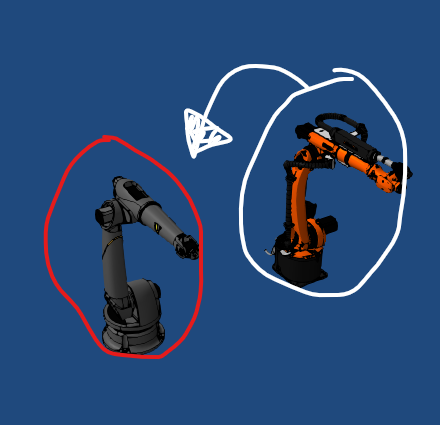
I am trying to replace only the modeling/geometry image of the Generic Articulated Robot with the KR12R1810_2 model.
However, even if I align all the coordinates, once I move the robot, the joints become completely misaligned.
Could you please let me know if there is a way to replace only the geometry/image?
Thank you.