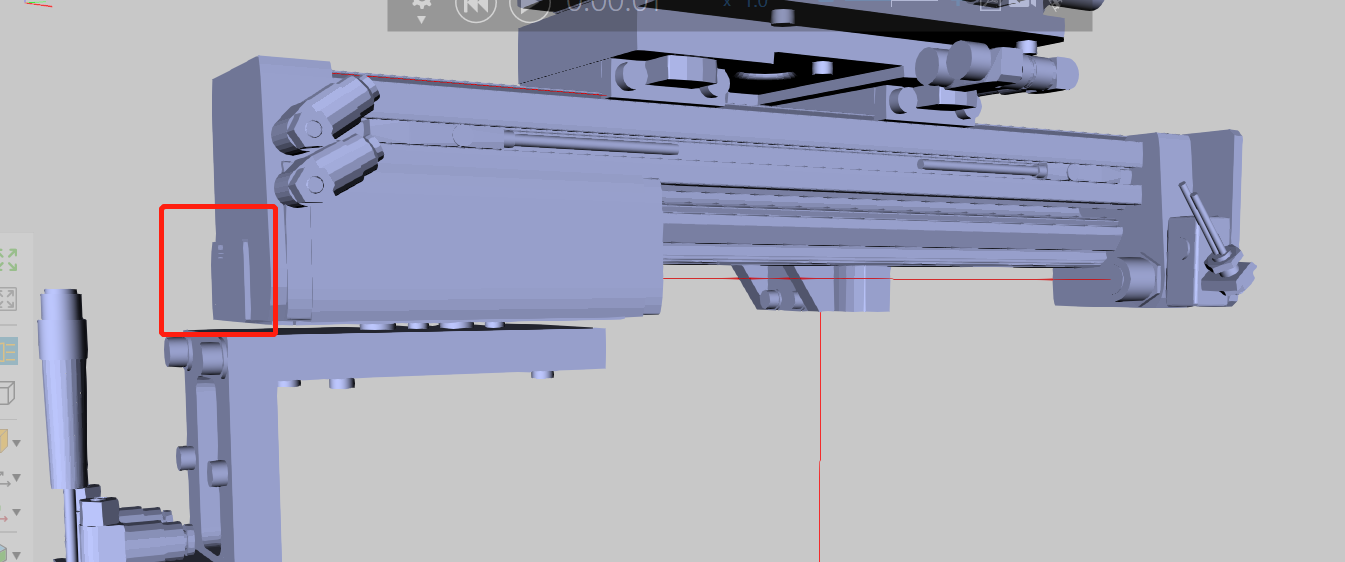
Hello brother. I have created my robot using the template for a 3-axis Cartesian robot. When I run the simulation it looks fine, but when I look closely, the lower y-axis is out of range, which is obviously not realistic. I would like to create another y-axis so that the motion of the lower y-axis is not out of range by the motion of the upper y-axis. This seems to require modifying the python kinematics script, but there is so little help documentation on this, can anyone tell me how to do this? Thanks!
Changing Kinematics is pretty hard. This could be a workaround:
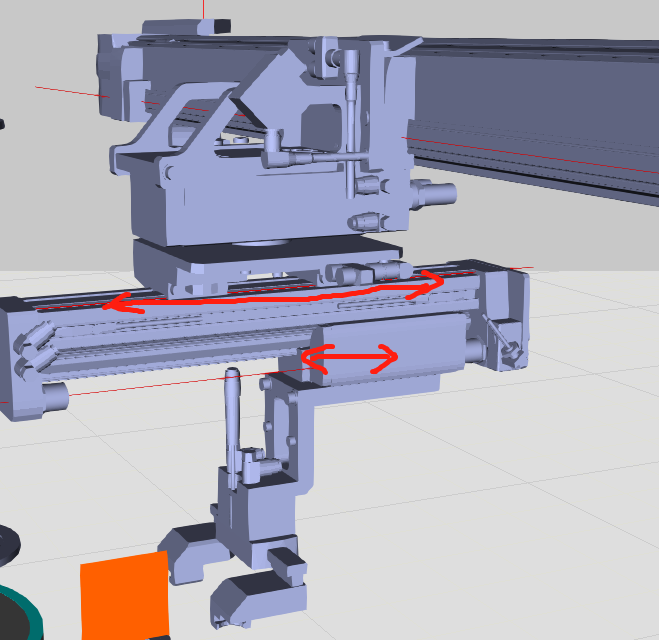
Link_2 follows Link_1. I modified the rate at which it follows to VALUE*700/900 to make them start and stop at the same place. Hope this helps!
1 Like
Hi @miaowentao,
the trick I used was to have the upper Link be the follower of the lower! That way the upper link should not be part of the kinematics. The upper link is thus just for “decoration”.
2 Likes