Hi,
I have advanced the definition of my project and I am getting back to you to find out how I can modify the position of the products as explained in the previous message.
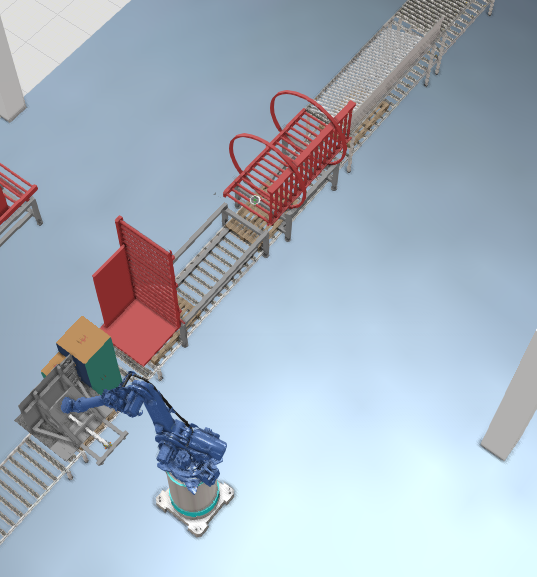
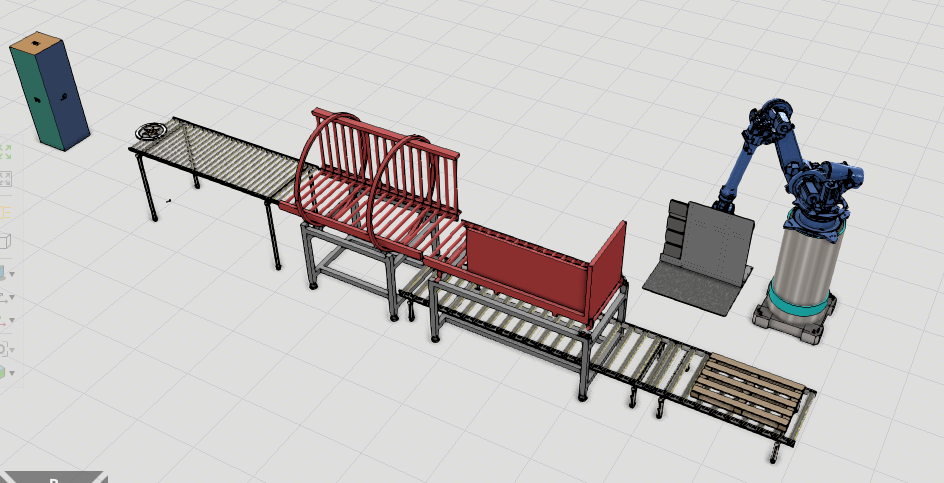
Here are the new images.
Hello,
I would leave the Path out of the link and add a ComponentContainer in the link. Then you can use a Python script to control everything. You’ll need a Path sensor to know when the product arrives in the middle and the “grab” the part in the ComponentContainer, rotate it, “grab” the part in the path again and so on.
Don’t forget to activate the RetainOffset in the Path.
Thanks a lot for your help !
IT was my first time doing Python script.
With your exemple I was able to make the adiitional movements I needed.
I have a few more questions if you have time :
1- The rotation time set by a property does not work, I changed the speed but do you know why it did not work?
2- I would like the two movements to be simultaneous when the second set returns, is this possible?
3- And finally the robot must retrieve the part to palletize it, how to do this? Test-PYTHON.vcmx (4.1 MB)
Hello,
I have solved the first 2 points, can someone help me with the third?
I would like to retrieve the part from the robot tool and then palletize it. 250703-Pivot_H-PYTHON-V2.vcmx (3.8 MB)
Hello,
Nice work with the second component, it looks nice!
In your case it might be easier to programm the robot than to use the TransportController and ProcessFlow to do the movement.
I would put the robot on a standard pedestal (not TransportController) and use signals in the component “ass-pivot-vert” to signal the robot when he should come and take the part and then recieve a signal from the robot when he took the part.
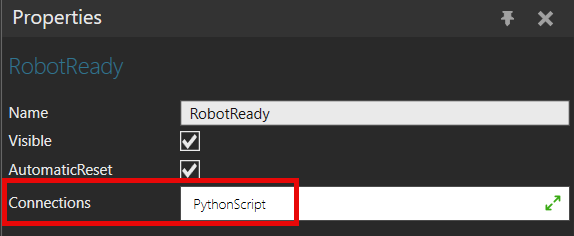
To use signals in your Python script:
create Boolean signals
add your PythonScript in their Connections property to be notified when the signal value changes