What tutorial videos did you watch? Would it be possible if you linked them here and gave some feedback on them? The reason why I’m requesting feedback is because from what I understand that you want to do is a simple pick and place application, using Process Modelling (based on your tag).
I would personally suggest this course, unless you already watched it. Could you elaborate a bit more on what do you want to do?
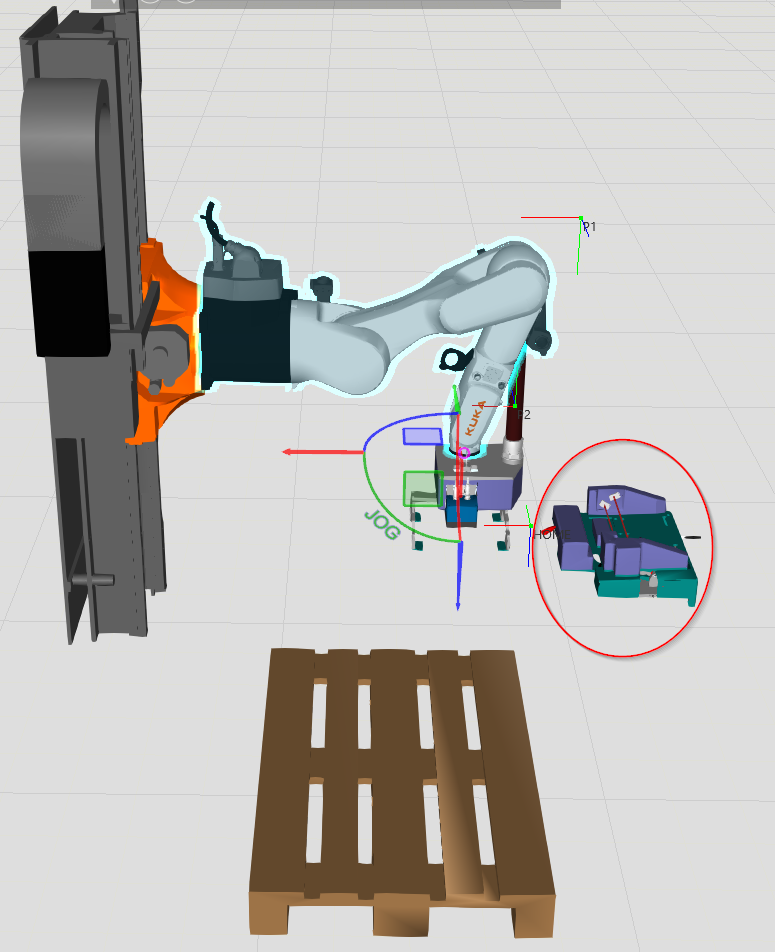
This is my setup, with the pick position circled, and pallet where the robot will stack the boxes.
I’m using a Kuka robot, with the kuka add on btw.
The video mostly explains the flow, and not how to setup the feeder. Do i need to make a flow from pick position to pallet?
In this video: https://www.youtube.com/watch?v=3eCreEJ-YG8&t=736s
It shows how to model a product feeder, but it outputs to a conveyor, and so the product are moving, and i dont know how to avoid that?
There’s a very simple solution for this where you don’t have to touch the modelling tab (unless you want to learn that). Bring the custom CAD geometry in, put it wherever the robot can reach. Next bring in a “Feeder Process” from the native Ecat and place it on top of the custom CAD you imported. You can also attach it to the custom CAD so the feeder follows the CAD.
Next, you can bring a sink process from the native Ecat and place it on the pallet. You can also attach the sink process to the pallet if you so wish.
For the final step, you can bring in “Robot Transport Controller” from the Ecatalogue, place one of our ready-made gantries on the controller and then finally place the robot on the gantry (with PnP tool on all 3 of them). Now you can use process modelling to make the robot pick and place the products.
As a direct answer to your question on “how do you make products not to move” is due to the path behaviour. If you want the dynamic products to be static, you should use component container. And for the “flow” itself, you can either do this with robot programming or use process modelling. I would highly recommed PM and for you to check the earlier linked courses.
Maybe i need to clarify: What is important to me, is to check the robot movements, and the robot program, not so much the “flow” of the machine, so i need to use robot programming.
So can i simply make a component container, and have the robot grab the component/product with its tool, and then place it on the pallet?
I checked out the video on component containers, but it just seems that i need a container on the robot, in order to grab the product from the feeder container? is that true?
If you want to attach things (such as product to a tool/end effector in a dynamic manner) you do want a component container “in general”. Attaching components to each other allow them to “move according” to some logical hierarchy, such as the component following the tool (grasping).
In your case, you can generate the product/component practically anywhere, and it’s easiest to do with native behaviour so you do want a component container where you create the component. Next you can use robot programming to grab the product and then release it wherever you want.
I would suggest testing this with two static boxes that you dragged from ecat and then trying to stack them on top of each other. Please also see the tutorial for basic robotics if you have not already: