Hello,
I am trying to model a Product Batcher with physics enabled. Is there a way to use the “PhysicsConverter” to do so?
Another doubt is that I need to pick products at the conveyor. Do I have so define physics for the gripper?
Thanks for any help.
André Castro.
Hello
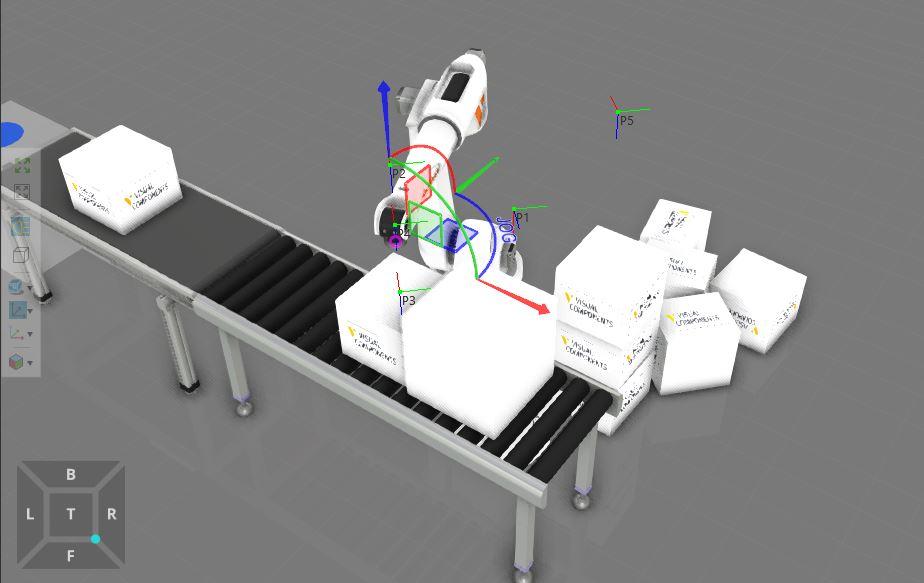
Yes, You can convert “Standard” product created by product feeder to physics compatible with “PhysicsConverter” component. Then Your mechanisms using physics entities should work (You can look for example from Physics Pusher).
Even a component is compatible for physical simulation OR is part of the physics, You can still grab a dynamic component/part to a container directly.
Example from this layout attached.
Hope this helps.
Physics-stopper-with-robot.vcmx (1.37 MB)
Hey, eCatTroll,
although it’s a similar solution I still need to use the “Product Batcher” component. I use the “BatchSize” variable, and sometimes I want to pick one or multiple boxes.
With the “PhysicsConverter” I could convert the boxes running on top of the conveyor, but not the conveyor itself. If I use the property “In physics” inside the “PhysicsConverter”, the boxes collide with each other in the path.
I’m still confused about how to model a physics conveyor by myself.
Thanks for the help.
Cheers,
André Castro.
EDIT:
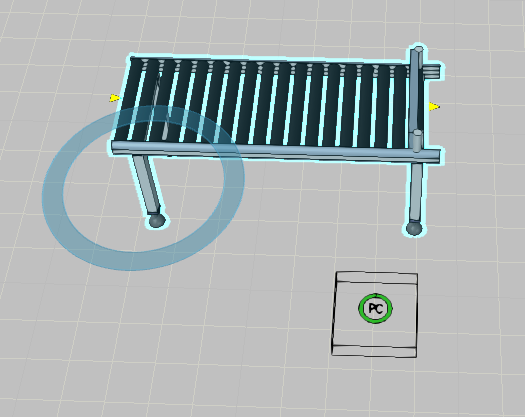
I attached the component I’ve modeling. What else is missing to transform it in a physics conveyor and transform boxes physic to “In physics”?
EDIT 2:
I’ve found a property in the manipulator called “Release to physics”, that solved the problem. The boxes drop down when released!
AdaptPack-Box-Conveyor-Physics.vcmx (81.5 KB)