Any help on this would be greatly appreciated. I am trying to create a process layout with an idea to modify the pick up and place routine later on.
At the moment I am able to complete the cycle of picking up a bottle and filling it up and placing it in a box. However I am unable to get the robot to keep on repeating the cycle.
Any help on this would be greatly appreciated. I have attached the file for reference
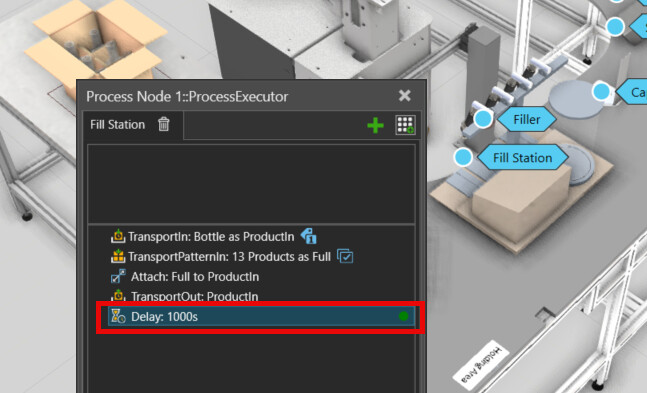
it seems to be working, but you have a Delay of 1000s in the second process, so it’s just waiting a very long time before repeating the cycle. You could either reduce this delay, or use a signal in the last process instead, to know when the cycle is finished and when to begin with the new one
yes, it waits for the Delay in “Fill Station” to be over, then picks another bottle and repeat the whole cycle. → with the Delay of 1000s you have to wait a bit more than 16 minutes…
I just tried with the singularity checked, but it still worked. With which version are you working?
I had a quick question around Robot programming combined with PM.
I am having a glitch with the pick
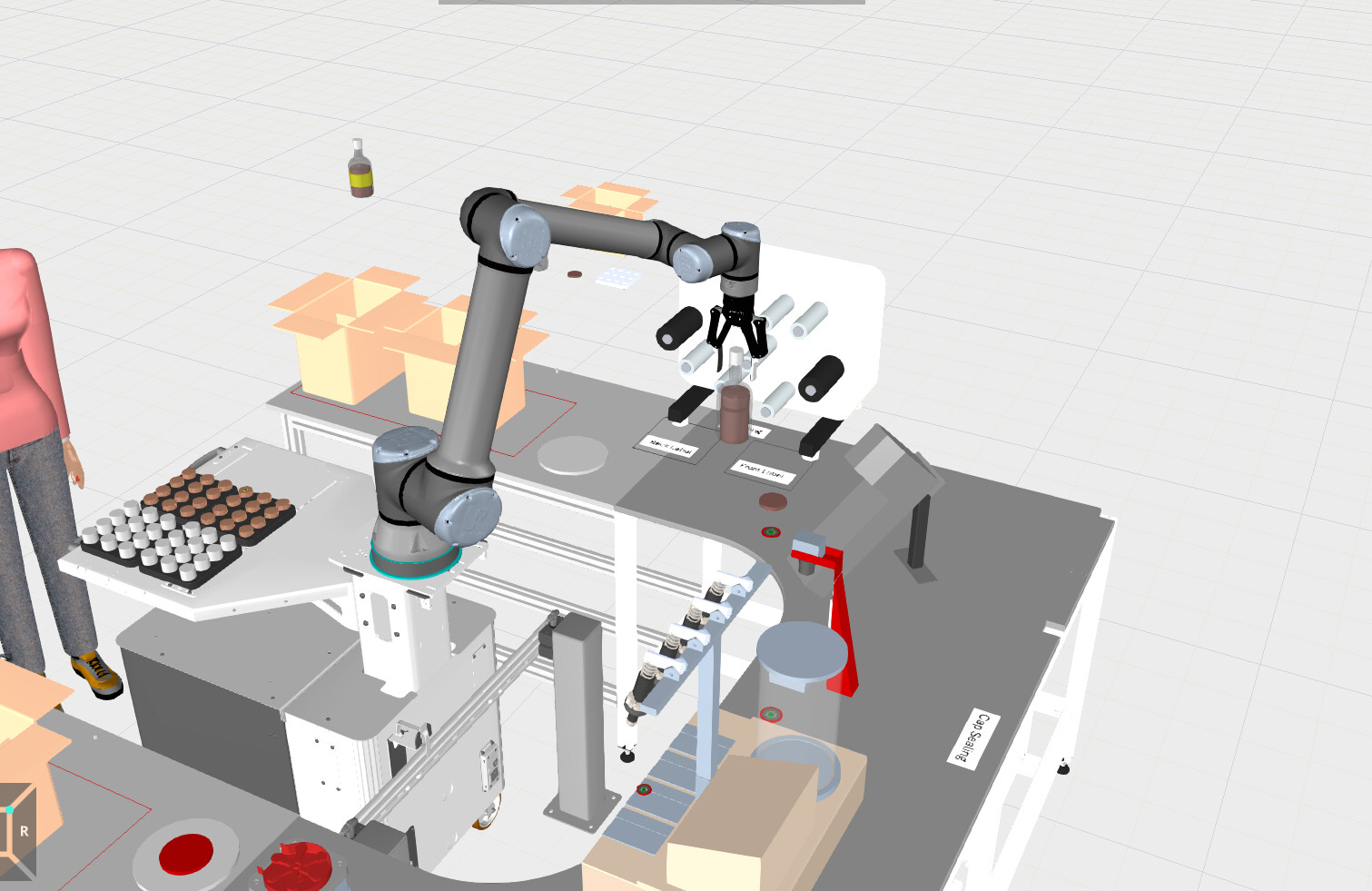
Pick from Top - Whenever I try to pick the bottle from the top - it does not lift all the components attached to it.
Also the Gripper Position - I want it to hold the bottle by the neck.
I tried manipulating the J Open and Close value for the gripper - but it does not work as it only takes either of one. i.e. If i hold the bottle from the side or the neck.
Any guidance on this would be really appreciated Thank you again