Hello everyone, I have the following problem:
I have simulated a real robot cell in Visual Components as part of a student project. It works perfectly.
The next step is to convert the program into RobotStudio and finally control the real robots with the program logic from VC. We proceeded exactly according to this video: https://www.youtube.com/watch?v=4BXGhO0YB6w&t=2s .
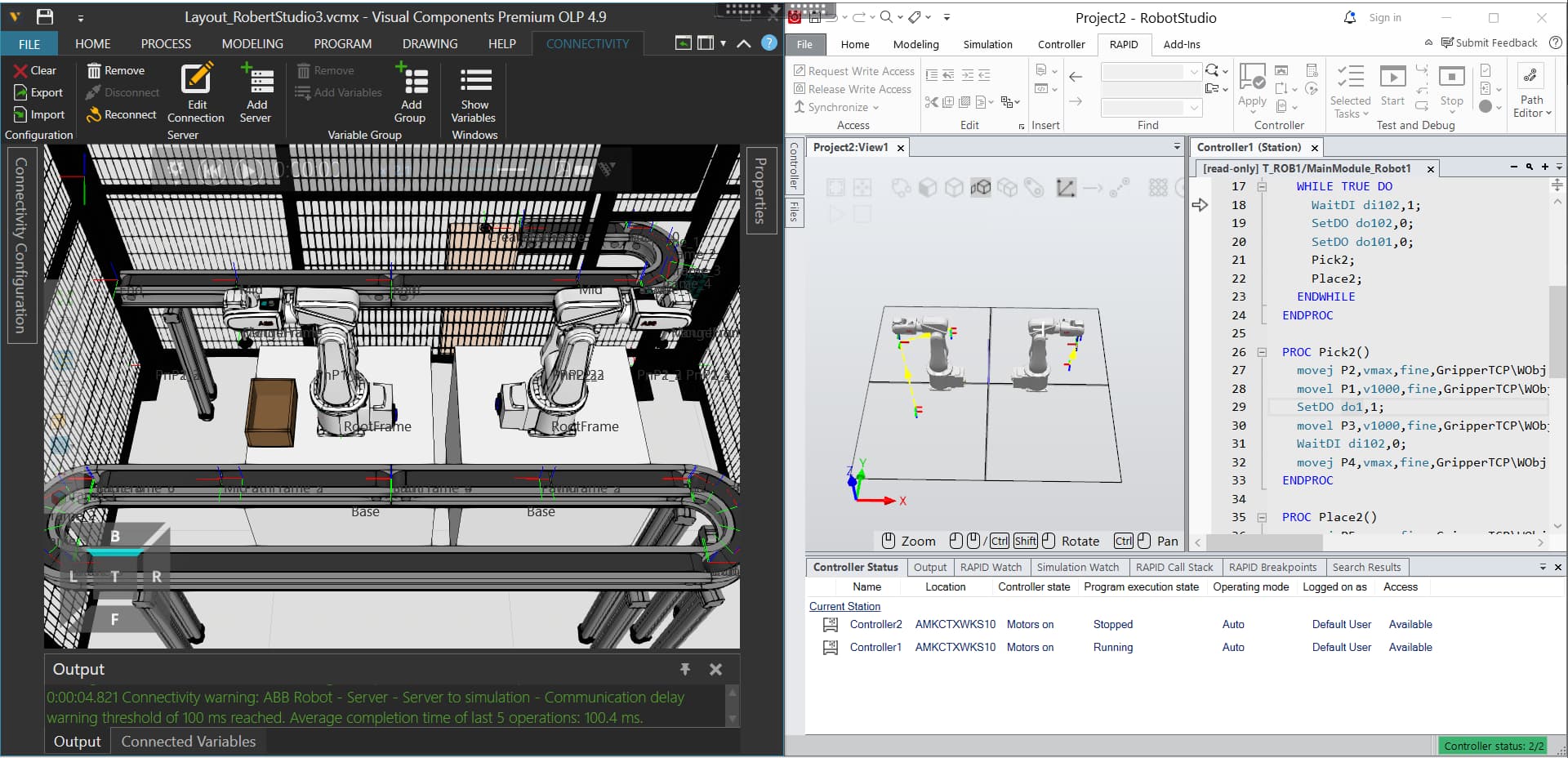
The only difference is that I have 2 robots and 2 controllers and 2 conveyors. However, when I simulate the program in RobotStudio, many inputs and outputs are not recognized or not controlled.
What could be the reason for this?
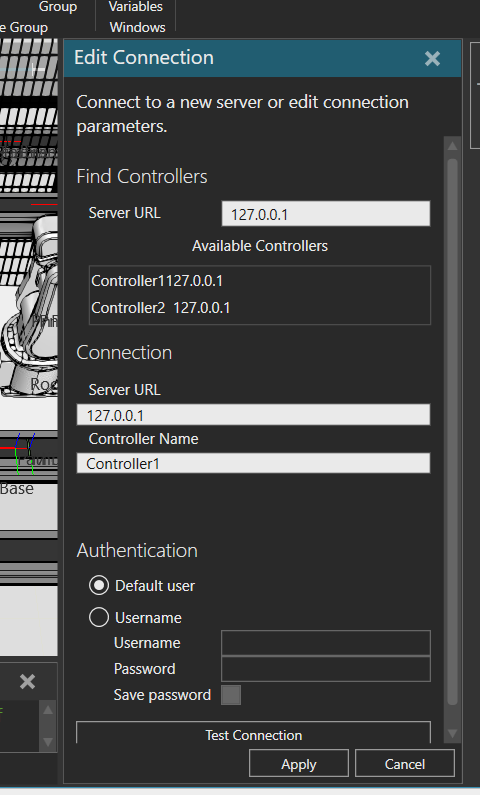
Furthermore, I have the question whether it is correct that the two controllers in RobotStudio have the same URL (see picture)? If not, how can this be changed?