Hey together, i found out a Problem with the OneToOneInterfaces. i wanted to place Robots in our machines with the help of OneToOneInterfaces in our machines with Hierarchie Field to place the Robot. my Interfaces are in extra Links. The settings are
Frame: the Frame where i want to place my Robots
Node: The Link of my Interface
Parent: active
All fine.
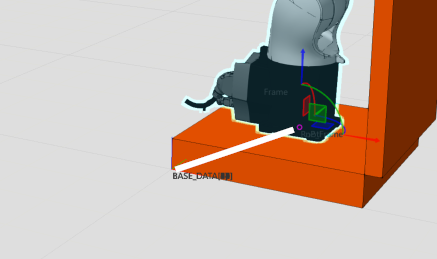
But now i make a new link for exaple a Door of my machine and i want to connect a robot the Bases will be at the origin of my machinecomponent and not at the mountframe where my connected Robot is placed. i have a simple layout for you with a KR 6 R900-2 robot and a simple machine, because i can’t show you our machines.
Test_PnP_Robot.vcmx (7.6 MB)
Can you guys tell me where my problem is, why the Bases of the robot will appear at the components origin and not appear at the mountframe?
I use version 4.7 Premium
Thank you for your help. ![]()