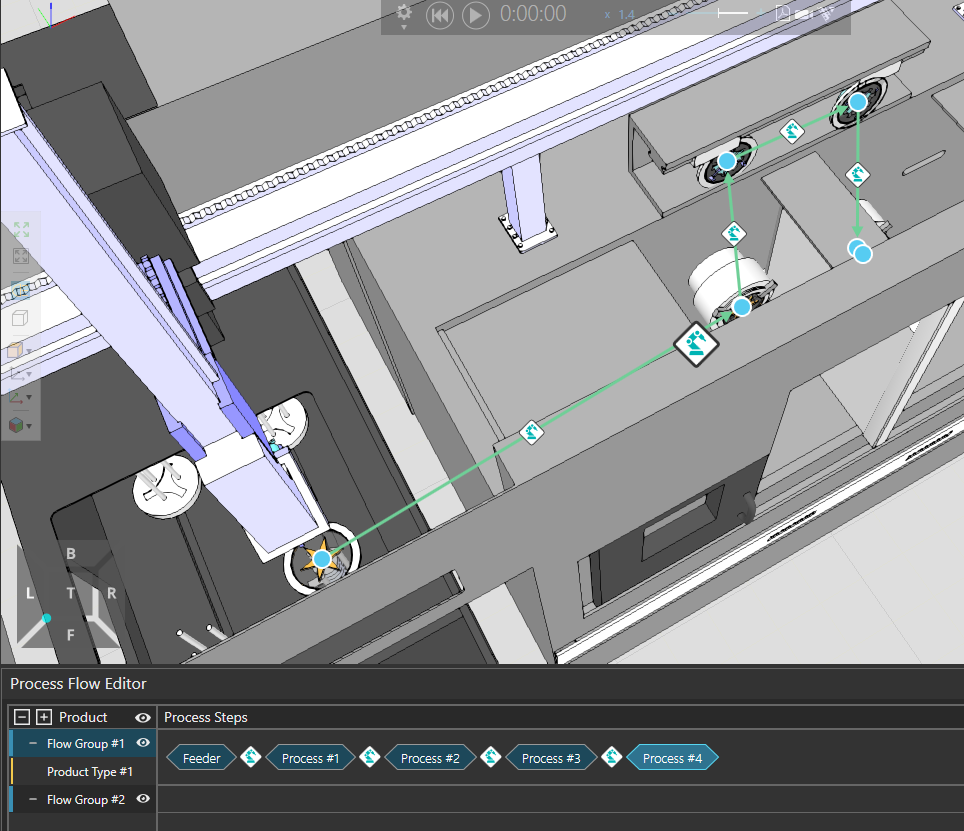
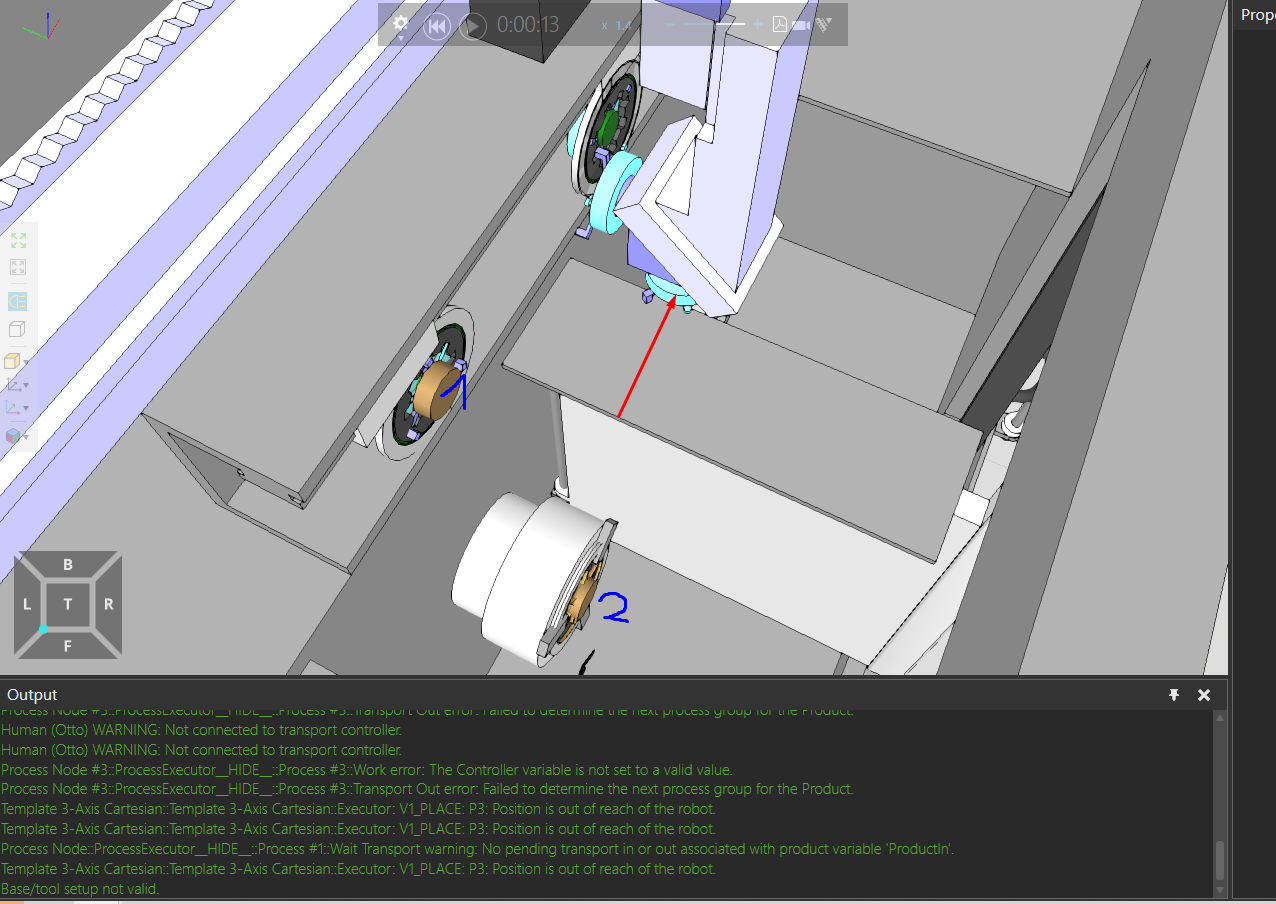
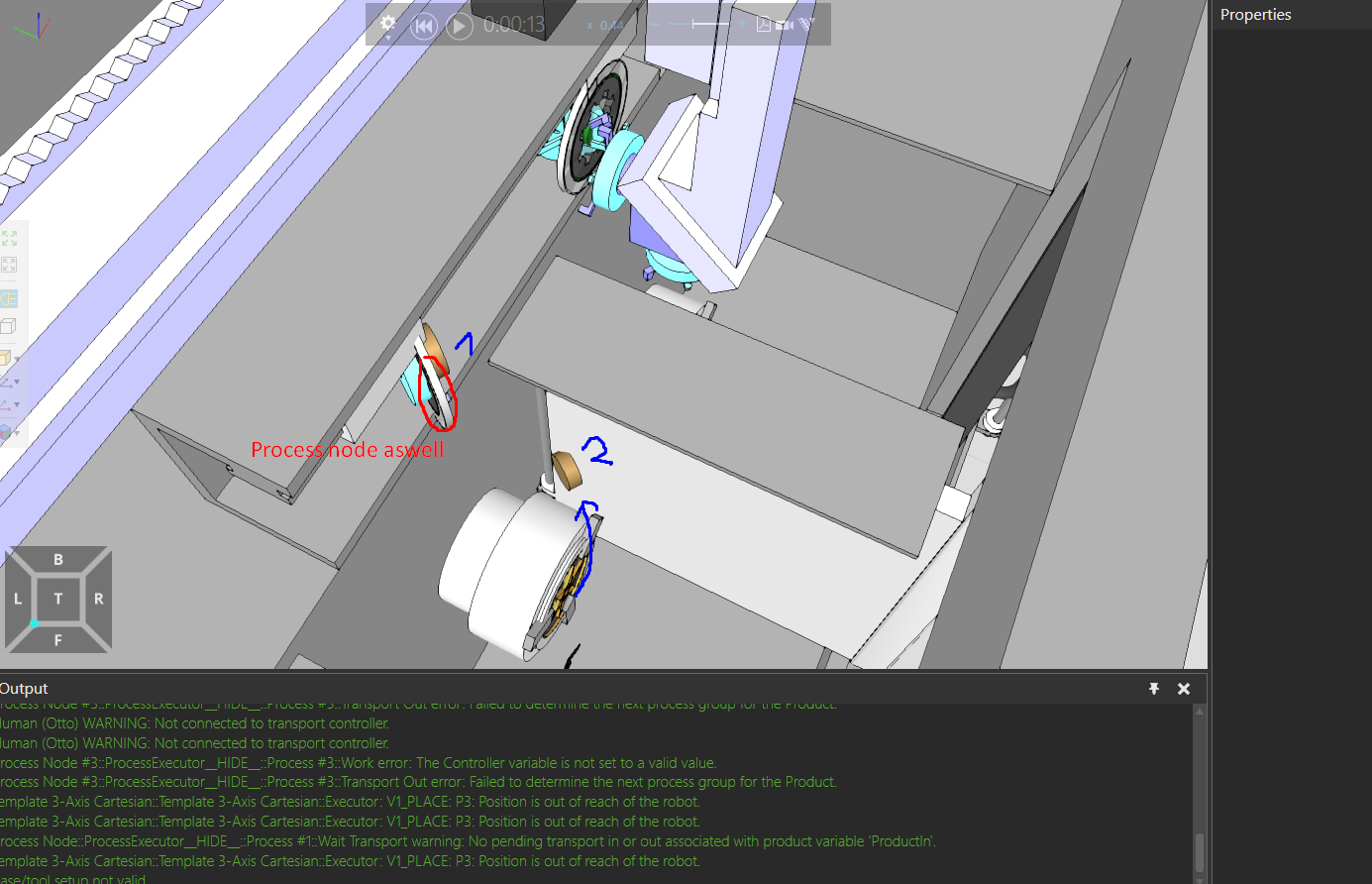
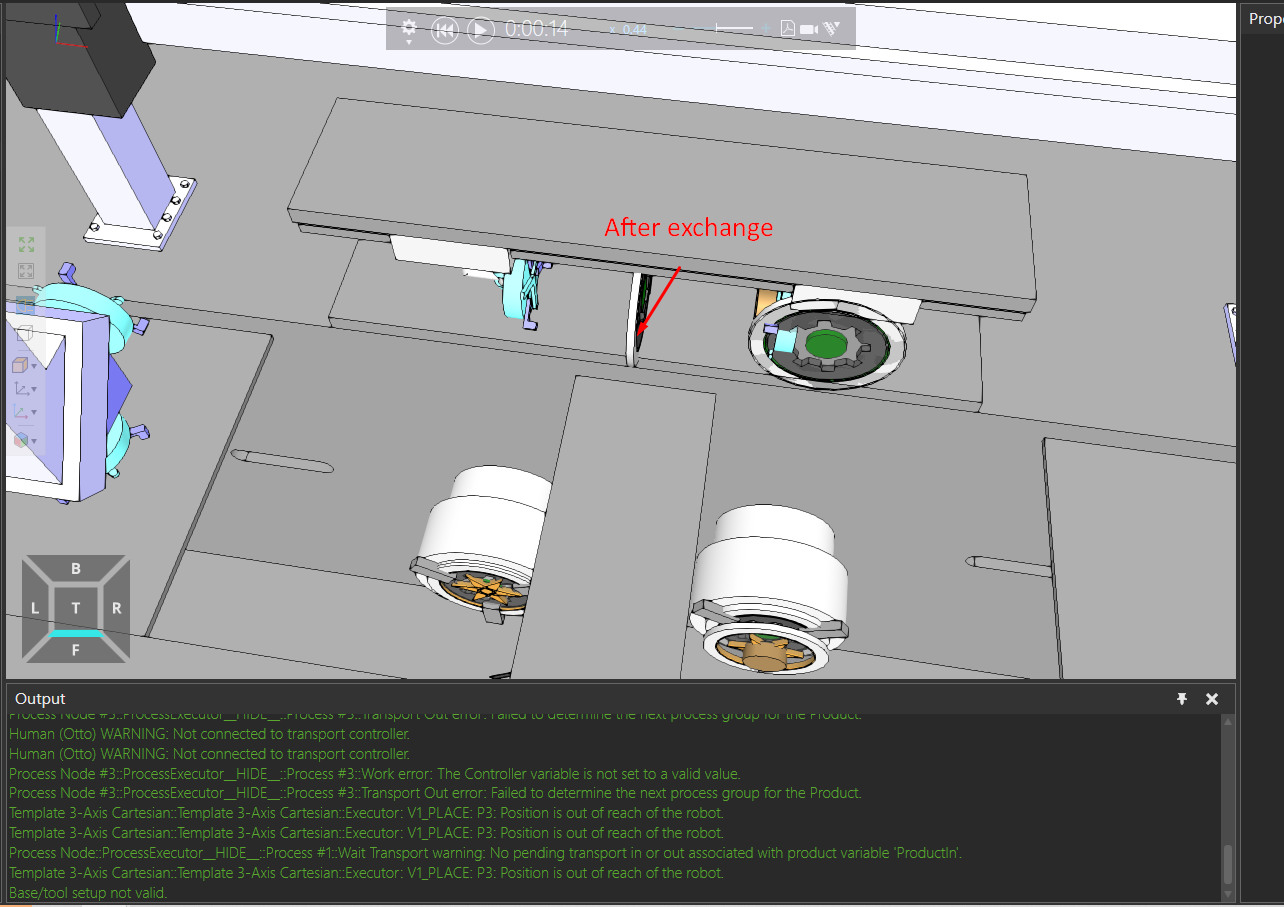
Hello, I’ve been doing some dimulation of manipulation robot handling. My flow line at consist of feeder-process1-process2-process3, but when i send my robot from process 1 to process 2, the robot grabs the component in process 1 + the process node. I have no idea why it grabs 3 items insead of just one and its a big problem. Anyone knows what the problem is? i checked the tool grab range, multigrab already, but no luck.

Hy,
difficult to say without the layout. Could be an PM reason or some other stuff…
F.