I try to create a layout like the “MiR with Shelf Module and Human Placing Parts” in mobile robot lesson “Simulate Mobile Robots - 5 - Examples of Using Mobile Robots”. There are two problems confused me.
![]()
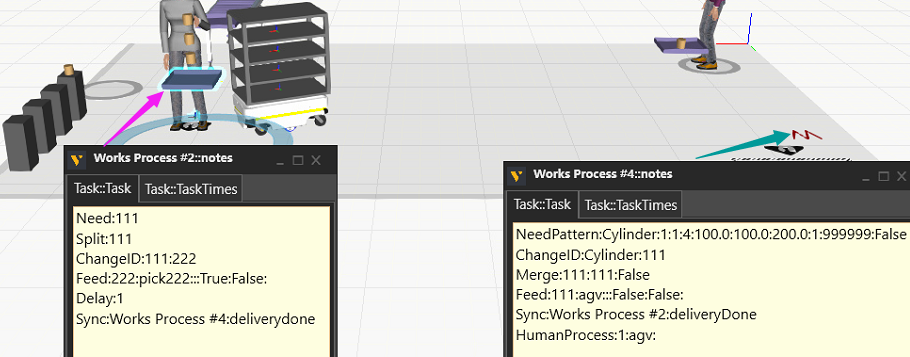
- The robot goes back before the left human pick all the product. The above picture shows the tasks of both works processes.
- How to set different positions for human to place the product on the works process areas? In the example there are four machines in the works process area, it needs four positions for human.
Layout-MiR-with-Shelf-Module-and-Human-Placing-Parts-modify2.vcmx (4.48 MB)
Please attach your layout, so others can help.
I don’t know if 5.3 version of Works library allows a mobile robot to perform a HumanProcess task. The lesson and its layouts used 5.2 version. Does the layout used in the lesson work on your machine?
- Where does the robot go? That is, to which station? Check that the robot is not doing/assigned the task of bringing Cylinders to Works Process #4. Also, check the Works Tasks reference guide for latest info on Sync and HumanProcess tasks.
- Do you mean the buffer area with the four gray pillars? Teaching a location should be similar to how it is done at a Works Process component, but others would know better.
Only insight I have is that the vehicle in the layout is not being told to wait. Instead, the vehicle is waiting for a task/job to do. So if the vehicle starts moving, it is because it has to do something, which is why I would want to know where the vehicle goes. If the vehicle goes to an Idle Location component, use some random text in the vehicle's IdleLocation filter to avoid it going to those things. Last time I checked, the mobile robot should not go to an Idle Location used by human resources, but that might have changed with 5.3 update.