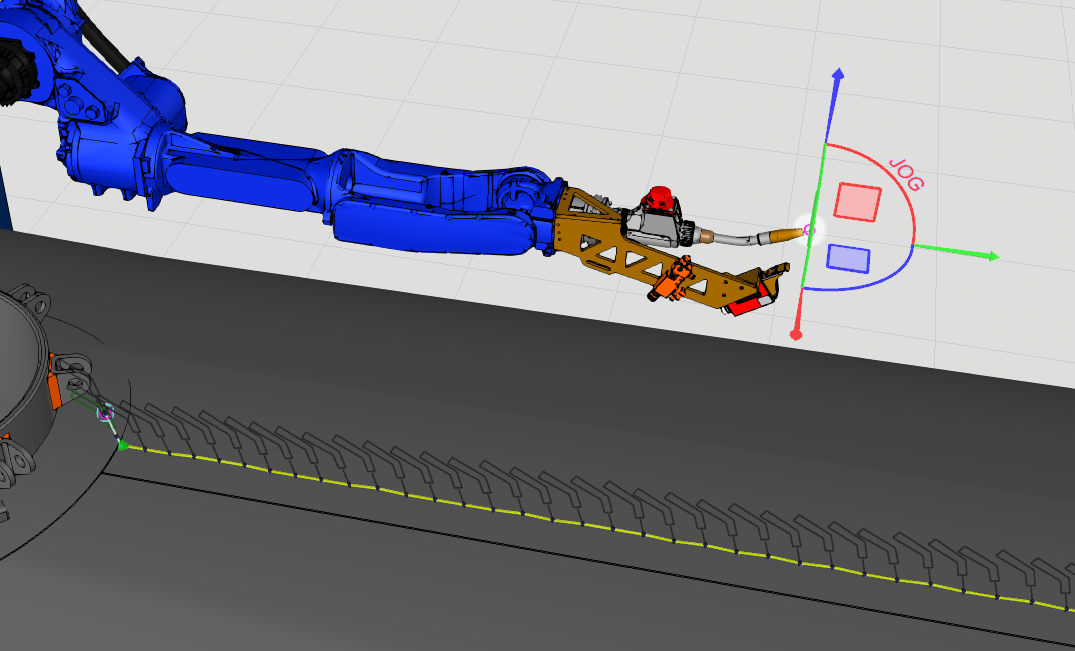
I have created a simulation and for some reason when I swapped computers - I now cannot teach a point or run the previous points in the simulation.
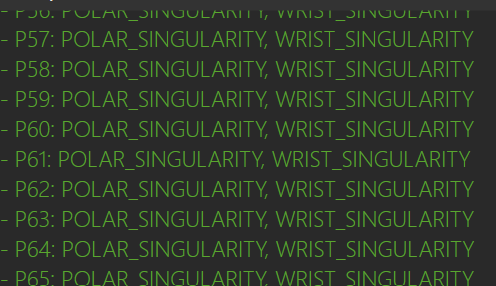
I get the error Polar Singularity on all points when I reanalyze the points, when I teach random points in space and try to run them together.
Also - now since I am in polar singularity - the robot does not start at the correct position or orientation.
Any idea why this would be happening?
I think your starting pose is at wrist singularity so axes 4 and 6 are parallel to each other. Try putting some angle on the 5th axis (e.g. 90 deg) so that robot isn’t at a singularity.
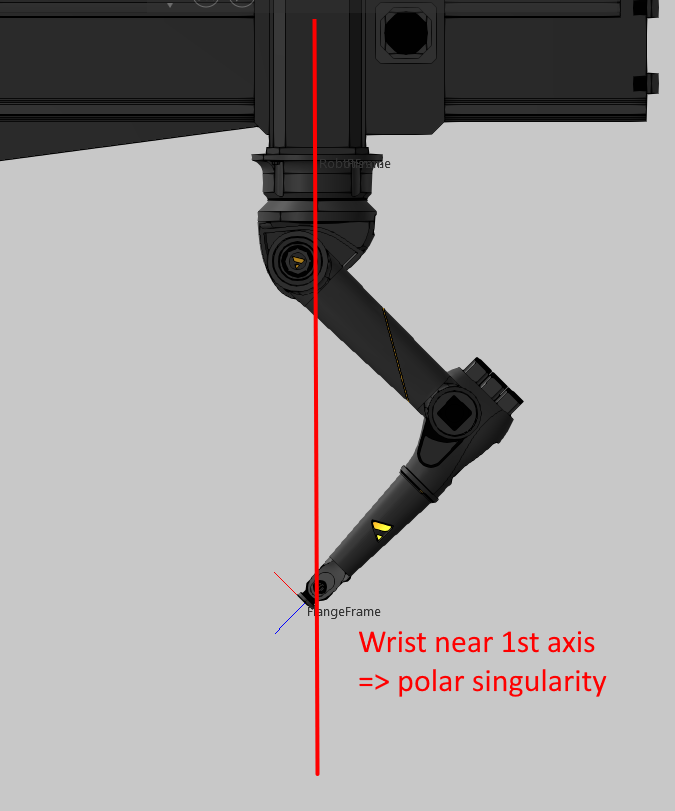
Or maybe the positions’ external axis values are set so that wrist is located on the 1st robot axes. This is indeed that polar singularity and the fix should be to try to offset gantry axis values to create some offset between robot axis 1 and robot wrist.