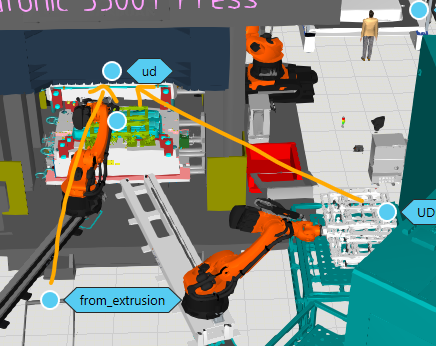
here in this, I want to perform 2 different tasks which are carried out by the 2 different robot,
I was not able to perform these 2 seprate task why is that?
I tried with 2 routine properties within one process executor. now only one of the either 2 tasks i am able to perform.
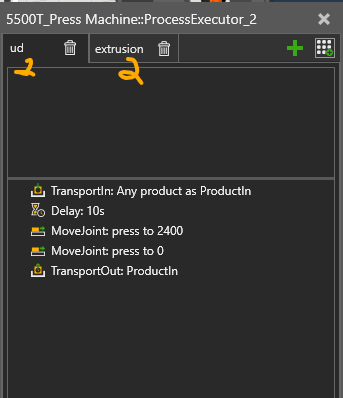
I want to perform these 2 tasks in one process executor how can i do it?
If you want to run those process routines in parallel or in sequence it is not really possible, you have to model them as a single process instead. You can of course do multiple transports both sequentially (TransportIn) or in parallel (StartTransportIn) within a single process.
If you want the machine to select which process to run based on some criteria, run that process, and then select again etc. it can be done by adding some process requirement statements to the processes.
The VC Academy has Process Modeling tutorials that should cover this kind of stuff.