Hi all,
I would like to simulate the following:
grasp row.vcmx (566.6 KB)
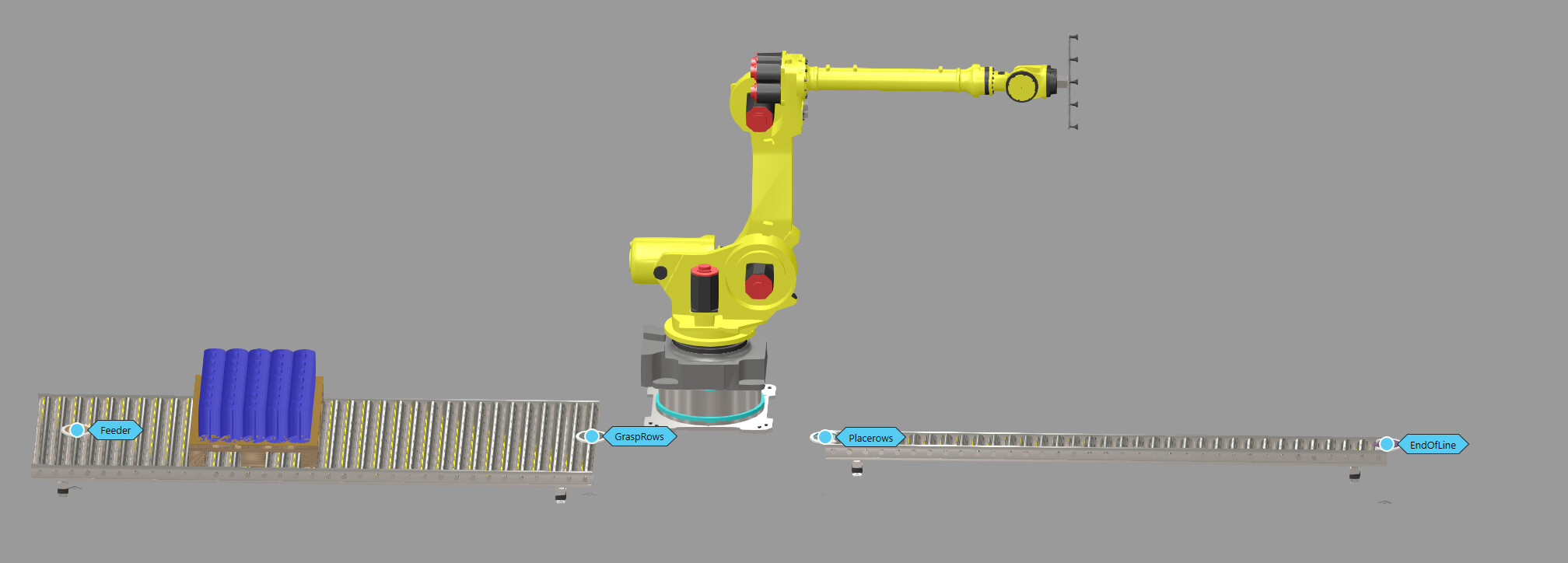
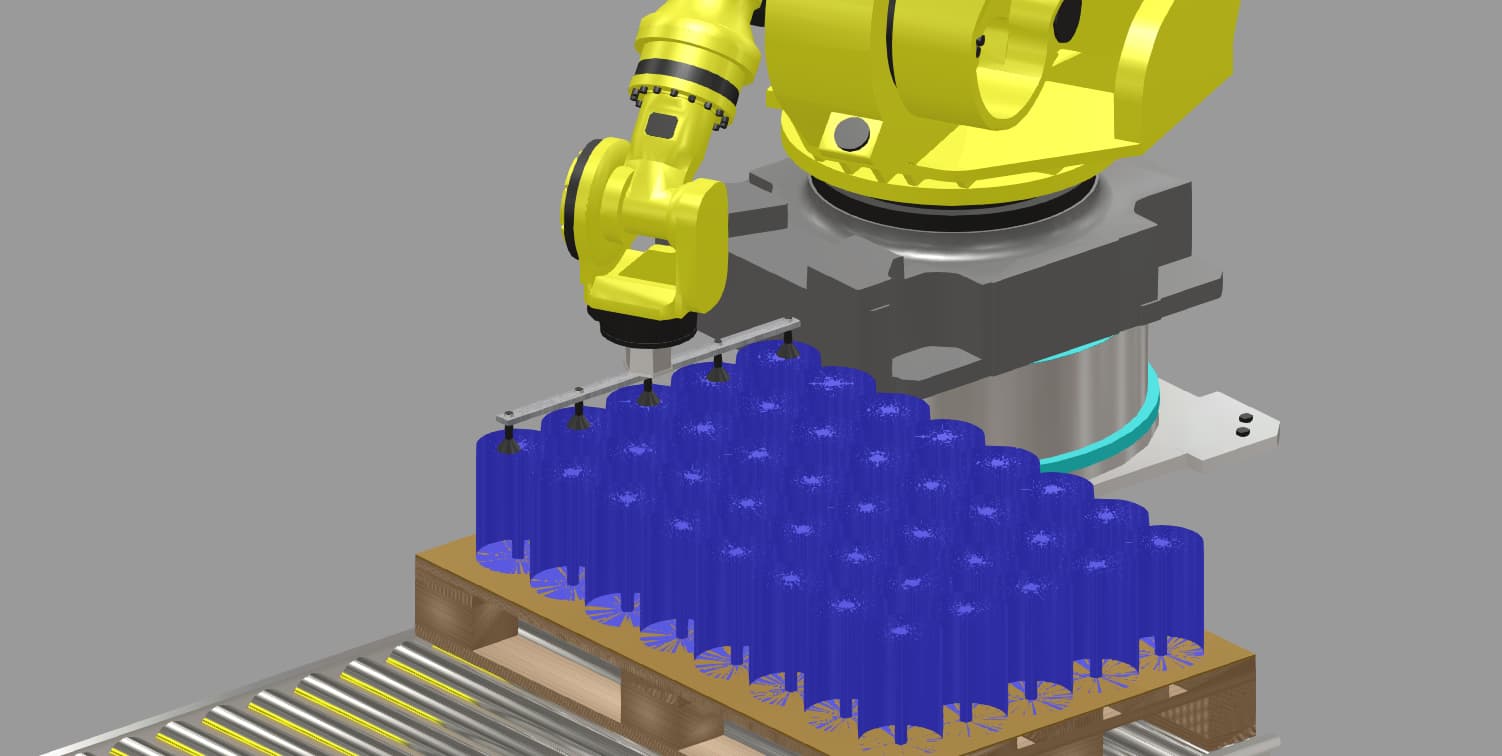
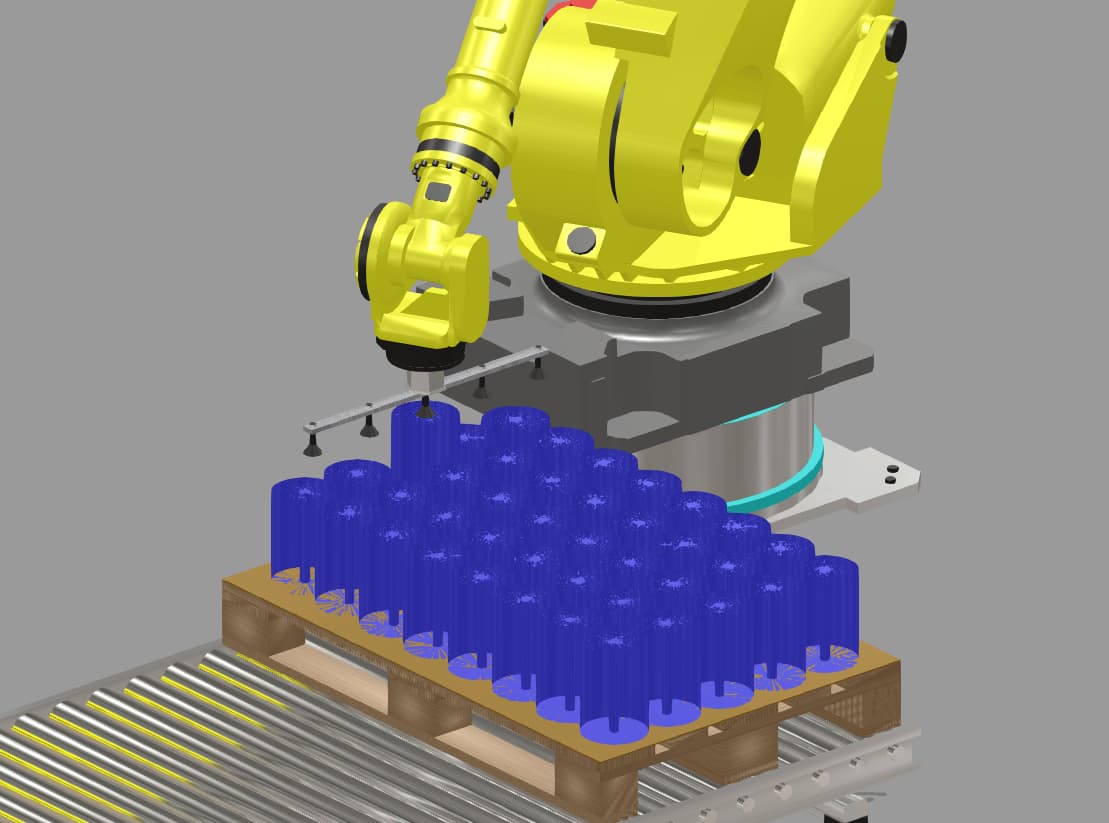
A pallet filled with tubes is transported onto a conveyor towards a robot.
The pallet stops at the end, end the robot is supposed to pick up the tubes per 5 pieces row by row.
I know it’s possible to program the robot itself but ideally I wanted to use process flow.
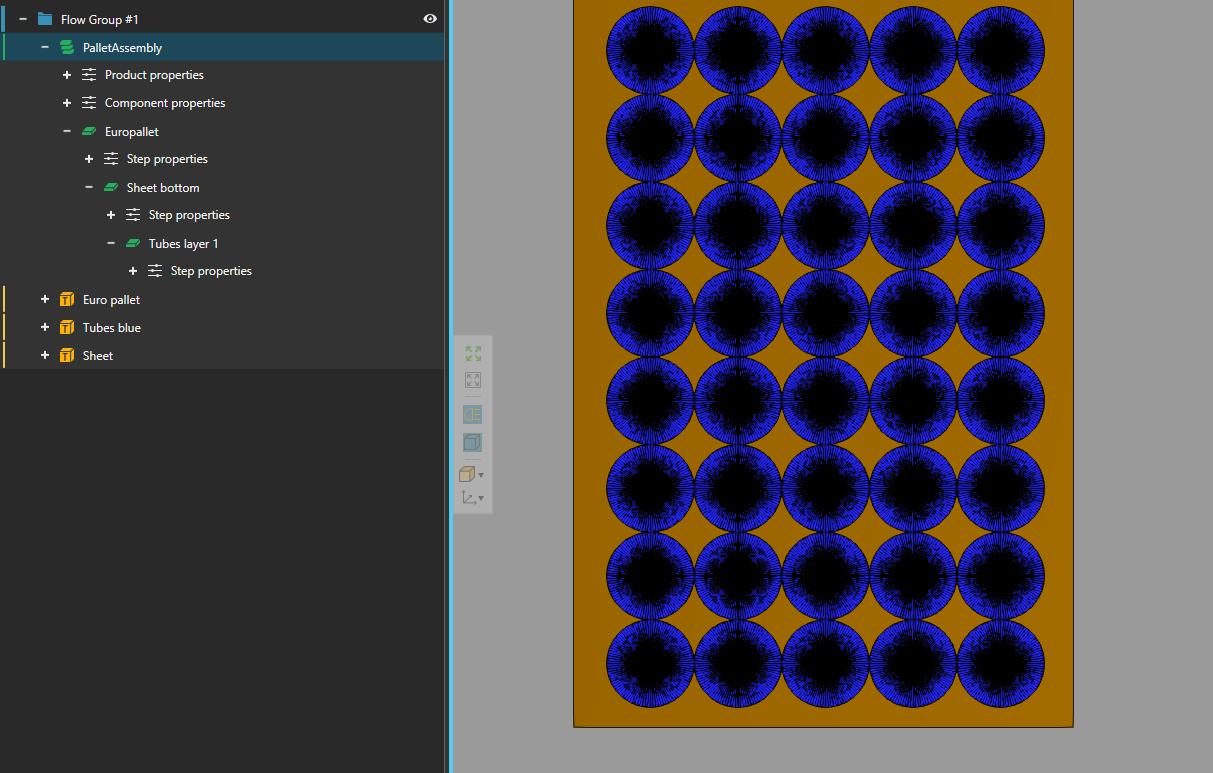
So I created an assembly of the pallet structure:
And I assigned the last process of the first conveyor to have the robot ‘de-assemble’ the tubes from the pallet and place them on the second conveyor:

This works perfectly, but I wanted to have the robot pick them up row by row.
So I turned on multigrasp:
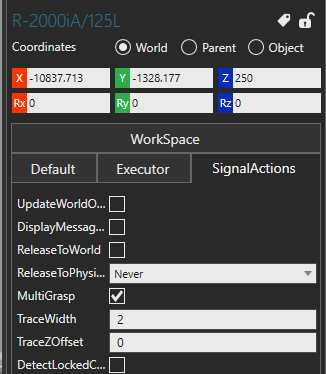
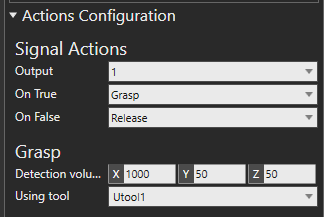
And also enlargened the detection volume:
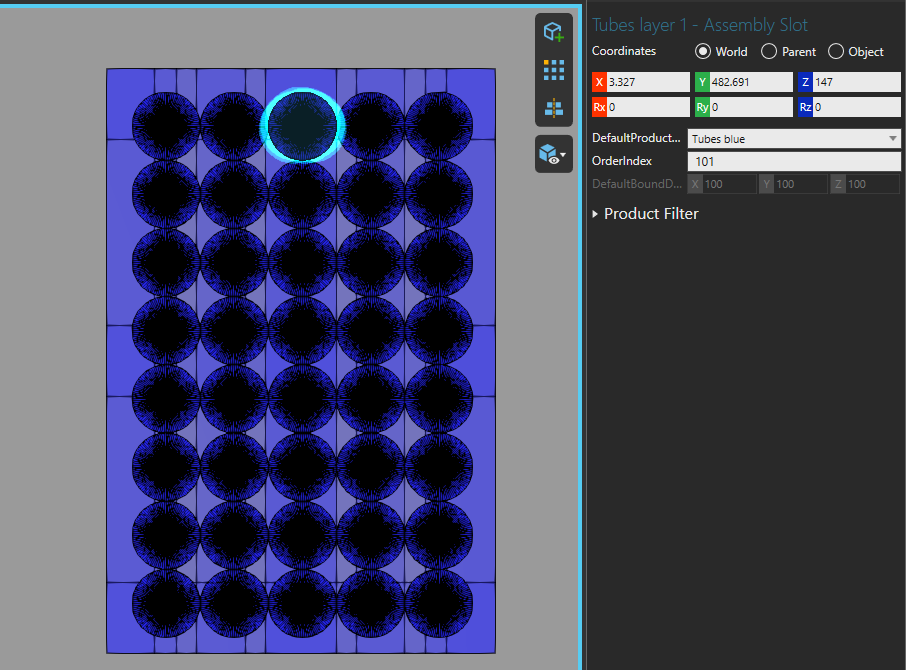
Finally, to make sure the robots TCP is in the middle of the respective row I assigned index values to the parts in the assembly.
Each row has a different index value, and the middle part of the row has that value+1 such that it always tries to grasp the middle part.
Unfortunately it still only picks one of the parts
Maybe the indexing is also the conflicting part because the other parts are not supposed to be picked yet due to their lower index values.
Does anyone know if it is possible to do this with process flow instead of programming the robot?