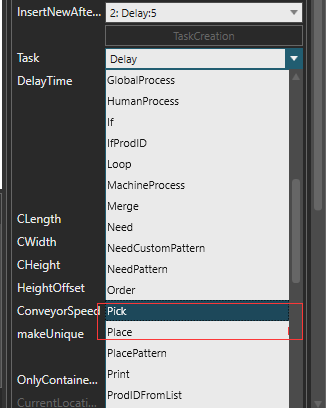
How do I implement pick or place order in process, just like in work process. *I can’t make a robot to grab an object twice in the same process
How do I implement pick or place order in process, just like in work process. *I can’t make a robot to grab an object twice in the same process