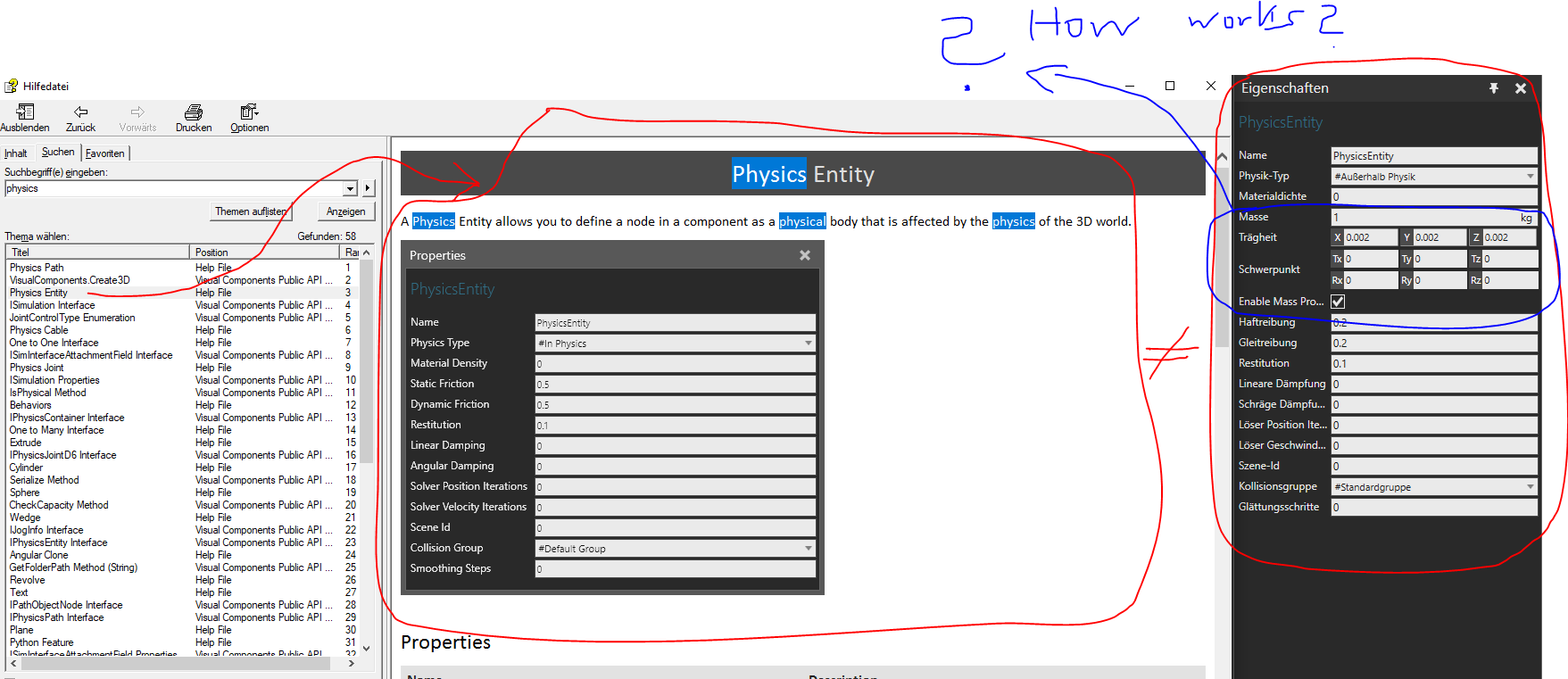
We will working on updating the help file. However, here is a reference for the mass properties:
Material Density:
(float, unit: kg/m^3)
defines density of the material
Mass:
(float, unit: kg)
defines how well the body resists linear motion
Inertia (moment of inertia, or angular mass):
(vector, unit: kg*m^2)
defines how well the body resists rotations
Center of Mass:
(matrix, unit: m)
In case the mass is evenly spread out, the center of mass will be in the center of geometry. This will be automatically calculated based on the geometry of the component. Otherwise, the CoM can be manually updated based on users requirements. For example, roly-poly toy -like behavior can be modeled by shifting the CoM downwards.
Haven’t tested it myself, but my assumption is that only translation values have any effect of physical simulation, rotation values most probably can be safely ignored.
Enable Mass Property Update:
(boolean)
Enables automatic conversion of mass properties. With this on, after editing single property, other mass properties (out of: mass, density, inertia) will be automatically overwritten to match the updated property. If such behavior is unwanted, this flag can be toggled off, which preserves given mass values if any one of them is updated.
Please note that the automatic calculations are based on the physical colliders, and not the visible geometry, so update the PhysicsCollider from Feature Properties to match the desired result.