Hey guys,
I am trying to simulate a machine tending process with an automatic pallet changer. So whilst the pallet no:2 is on the operation, pallet no:1 is facing the robot and robot is able to load/unload. (there are only 2 pallets on a rotary joint) , also robot is using dual gripper.
However I am stuck at process modeling.
Robot goes to pick up the product from the machine, picks it, and arrives to last approach (PickApproach).
This is followed by:
1. StartTransportOut statement is aborted before reaching WaitTransport Statement.
2. The message at the output panel “ERROR- Out of task actions!”
Robot does nothing after reaching PickApproach point.
Here are some screenshots:
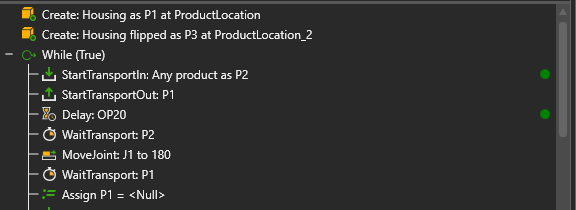

Transport link on which pick action is performed, however error is displayed just before it’s place action is performed: