Konan
1
Hello everyone,
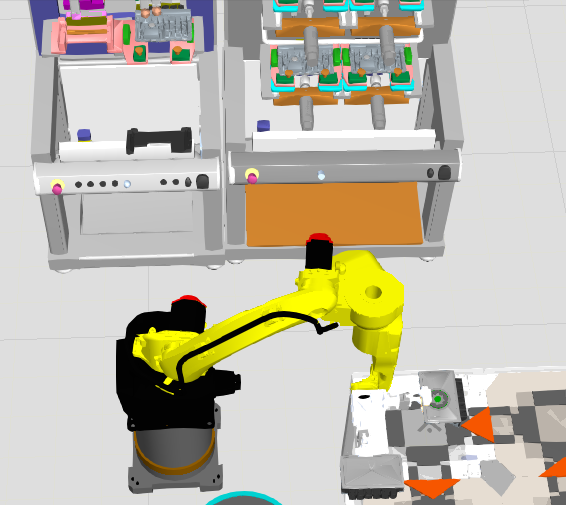
I have been working on a project in which I want to order my tasks as the picture below shows.
- Between 1 and 2, the product switching is making by a double gripper
Double Transportation concept : Robot loads the first product from source to destination with its first
hand and before unloading at destination, Robot uses its second hand to load the second product and
then unload the first product to destination. Finally, the second product is transported to its next
process.
Questions
- How can I order the tasks like I want
- How can I make this concept of multiple transporting
Thanks in advance
1 Like
Konan
2
Can anyone help me with this problem?
anhu
3
hi
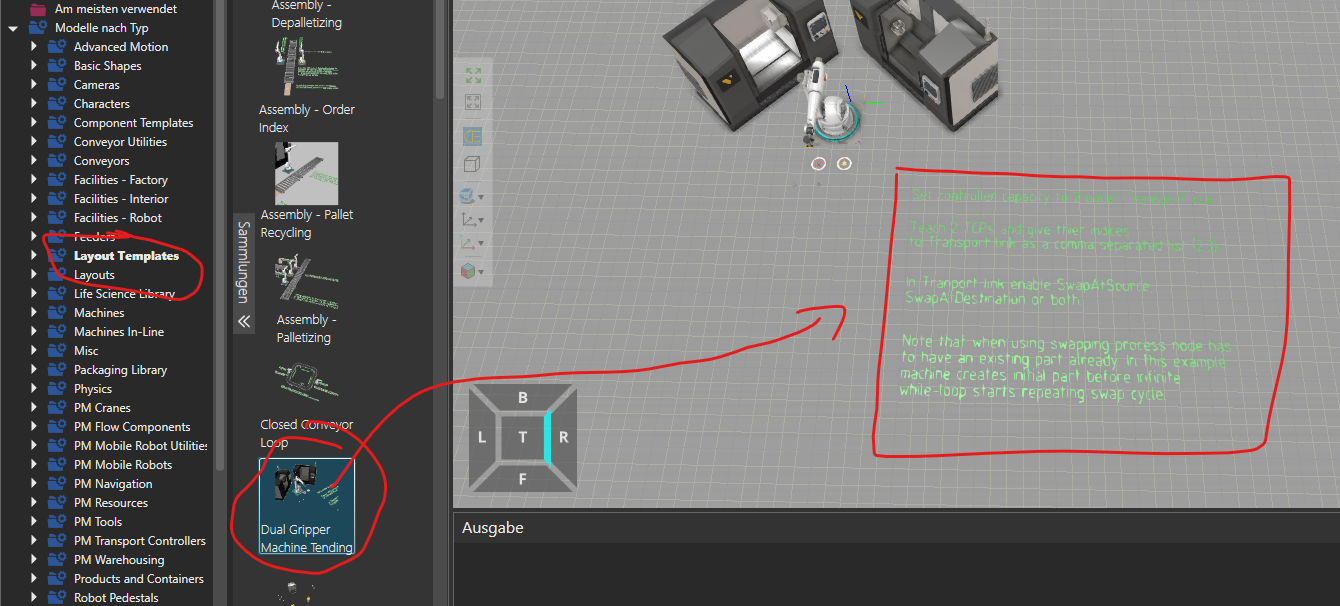
maybe PM Dual Gripper Machine Tending layout template can help:
note: instructions as text on the floor
1 Like
Konan
4
Thank you @anhu ! I got some exciting results. But after 6 minutes, the robot doesn’t work. Any idea ?
Result 1 :
Result 2 :
Result 3 : The robot doesn’t work anymore !
anhu
5
messages in the output panel?
Maybe no match with transport in and transport out parts to get the next task for the robot
Konan
7
Nothing special in the output tab, but I’ve noticed that the green dot in the robot program tab moves
between VC HelperLinearmoves and VC HelperjointMove sequences, when the robot is active and
disappear when it isn’t active.
idkfa
8
No error message is the most scary situation  It would be easier to have sample layout to check.
It would be easier to have sample layout to check.